Лидеры




Популярный контент
Показан контент с высокой репутацией за 03/13/24 во всех областях
-
Мы рады представить обновленный функционал нашего сайта! Теперь каждая игра в каталоге получила индивидуальную страницу с подробной информацией и уникальными возможностями. Примеры страниц: Общая страница игр Пример страницы игры — iRacing Что можно найти на странице каждой игры? Описание и основные характеристики — познакомьтесь с игрой и узнайте о ее ключевых особенностях. Новости и статьи — будьте в курсе всех актуальных событий и гайды, которые помогут погрузиться в игру. Галерея и видео-галерея — насладитесь скриншотами и видео из игры. Системные требования — теперь на странице с требованиями вы можете протестировать ваш ПК на соответствие игре! Например, вот тест для iRacing: Системные требования iRacing. Как протестировать железо? В разделе системных требований вы найдете специальную форму. Укажите параметры вашего ПК (процессор, видеокарта, объем оперативной памяти и т.д.), и система автоматически определит, насколько ваш компьютер подходит для игры. Мы стремимся сделать SimRacing.su удобным и полезным ресурсом для всех любителей симуляторов гонок. Заходите, пробуйте новые функции, и делитесь своим мнением! Оставайтесь с нами — впереди еще больше обновлений!3 балла
-
Решил произвести ребрендинг сайта. Давно было желание уйти из зоны .su, поисковые системы ее не очень любят. А домен iracers.ru давно болтался без дела. А вчера пришла идея нарисовать лого для этого домена и по-моему получилось неплохо. В целом iRACERS.ru — короткий, звучный и удобный для использования домен. SimRacing.su тоже остается зеркалом.2 балла
-
Зачем ты это сделал.... только решил, что этого достаточно для того чтоб поиграться сгенерить картинку и забыть, а теперь стало интересно что если добавить в анализ мониторные системы или вр.2 балла
-
Да как обычно, при покупке в магазине Ира выбираешь оплата со счета стим, далее пополняешь кошелек стим с учетом всех комиссий и вуаля2 балла
-
Разработчики iRacing готовятся расширить функционал своего симулятора, добавив карьерный режим для одиночной игры, что станет важным шагом для привлечения как новичков, так и искушенных гонщиков, которые ищут структурированные офлайн-соревнования. https://simracing.su/1861-iracing-vnedrit-karernyj-rezhim.html2 балла
-
По мелочам — я бы убрал «просветы» в буквах и между ними, а «засечку» на I сделал чёрной. P.S. Ну и нижняя засечка на «S» мне кажется избыточной, поскольку нарушает «динамику движения вправо»
 1 балл
1 балл -
Чот так понравилось, что захотелось попробовать замодить Корсу, составил инструкцию, больше для себя, но может еще кому пригодится. Только вот ездить все равно не интересно, не нравится поведение авто и ффб. Всеж мне пускай будет меньше графики, но лучше ощущения от управления автомобилем.1 балл
-
Ты можешь там в кайф пострелять за счёт тех, кто донатит. Без них игры бы не было. Так что, по своей сути, это — именно подписка, поскольку для «комфорта» (а большинство пользователей предпочитает именно «Pay-to-Win») требуется регулярный вброс денег : ) А что можно в удовольствие играть в «донатно-ориентированные» игры без затрат — сомнений нет. Я сейчас именно так и делаю с Arena Breakout Infinite. Причина падения — это ты. Chrome ломал, Windows ломал, AC1 ломал, ACE запустить не успел и уже сломал : )1 балл
-
Ну да.. Надож самому заценить че там ))1 балл
-
Будь это хотя бы отчасти так — то, с учётом околонулевой стоимости, AC давно бы захватил мир. А по факту имеем небольшого размера комьюнити, которое тонким слоем «размазано» по всей этой бесконечной поляне модов. Моё мнение неизменно — моды это зло, а «долгоиграющие» игры должны быть на «подписке» : )1 балл
-
@Zemlanin Десять лет назад я бы прямо из головы написал статью на эту тему.. но сегодня память подводит : ) Навскидку примерно такой расклад - до конца 80х все ездили с МКПП+сцепление. В середине 80х различные команды начали эксперименты на тему полуавтоматов. Вроде бы первый "официальный" пример использования полуавтомата в боевом болиде - Феррари 1989 года. Дальше был переходный период где то до 94-95 года, когда все больше команд переходили на полуавтоматы. Скажем Макларен и Вильямс перешли в 92м, Бенеттон в 93м, команды второго эшелона такие как Форти, Пацифик, Минарди, Симтек, Лярус до 94 года использовали МКПП. Последней машиной в Ф1 с МКПП вроде как была Форти 1995 года. Вот что про это рассказывал Патрик Хэд1 балл
-
iRacing и Microsoft Research объявили о сотрудничестве в разработке передовых технологий искусственного интеллекта, что станет значительным шагом в развитии гоночных симуляторов. Основное внимание уделяется созданию моделей Large Action Models (LAMs) — сложных систем ИИ, способных справляться с задачами в динамичных средах. Эти модели улучшат платформу iRacing, внедрив более реалистичных соперников на основе ИИ, виртуальных тренеров и функции, такие как виртуальные гоночные инженеры. https://simracing.su/1870-iracing-i-microsoft-razrabatyvajut-ii-v-gonochnyh-simuljatorah.html1 балл
-
Блиииин, вот я дурачок, ахах. Сработало, спасибо! Я почему-то думал, что при продлении отсюда надо обязательно банковскую карту привязывать к стиму, которая не привязывается в российском аккаунте. Я всегда ждал окончания подписки и со страницы магазина покупал ее заново, тогда снимали со счета. Оказывается из списка подписок тоже так можно было. Рукалицо. Получается их новая мера только новые покупки затронула. Месяц уже не катаю из-за этого. В рфактор пришел... все не то, все не так... вроде и физика, и фидбек, но настраивать надо базу там часами аки Крамар. Все кажется каким-то разрозненным. Не понял я рфактор. Попробовал вернуться в АСС, где у меня 500 часов. Но слишком привык к VR. В асетке он ужасен. Короч, пошел катать))1 балл
-
да вроде бы ничего не исчезало... акк российский. сейчас зашел пополнил с пятнадцатипроцентной комиссией счет (сервисов полно) - 4900р. и вышло по курсу, грубо 49 американских. прошлый контент весь на месте. другое дело, не пойму как теперь новый контент докупать?
1 балл
-
Закончилась подписка, решил что хватит тратить деньги и кормить буржуев, тем более катаю совсем редко, поставил АСС, рФ2 в надежде, что этого хватит... Хватило на несколько часов, поплевался, удалил всю эту шнягу (устанавливал дольше, чем хватило энтузиазма в это играть). В итоге пополнил стимовский кошелек через мегафон, годовая подписка вышла что-то около 60 баксов (со всеми обменными комиссиями и всем прочим), что даже дешевле нежели покупать подписку напрямую через сайт иР по скидке, сейчас там год со скидкой 66 баксов.1 балл
-
Я приношу извинения, но это был не 1996, а 1986. Сейчас стал искать это видео и оп... 86. Пересмотрел кучу онбордов и видимо несколько смешались) Ещё раз прошу прощения. Речь вот об этом видео. Превью не вставляется, так что ссылками. Все ссылки ЮТ. 1986 Australian Grand Prix И ещё вот такое интересное. Вероятно секвентальная, но на ручке. Такое ощущение, что вверх он сам переключает, а вниз автоматом. Rookie Schumacher Dazzles At The 1991 Spanish GP И ещё несколько 92 https://www.youtube.com/watch?v=IJ422Rc26Zw https://www.youtube.com/watch?v=zJUCPa33Py0 https://www.youtube.com/watch?v=7ocKUGIIRnw Что говорит о том, что в 92 подрулевые стояли далеко не у всех. И даже есть вот такой, и это 1993! Это, конечно, если описание верное. F1 Suzuka 1993 (Q1) Ukyo Katayama OnBoard1 балл
-
Сейчас модно отправлять в нейросети. Стало интересно тоже спросил GPT, вот что он мне рассказал Можно ссылку на видео? Вроде Лижье дольше всех оставалась с механическими коробками передач с рычагом до начала-середины 90-х годов.1 балл
-
МТС оплата https://payment.mts.ru/cyber/steam отлично работает. Комиссия относительно небольшая1 балл
-
БДСМ какой то : ) https://en.shiftall.net/products/mutalk2
1 балл
-
Приветствую! Доделал маленький ролик сегодня, думал не успею), к Гран-При Нидерландов. Надеюсь понравится, удачи! Ссылки на полный ролик. https://youtu.be/5zuuUjoUs0k https://rutube.ru/video/04738585e213748c73815cecdb4b2c95/
1 балл
-
Лучший тизер, просто лучший =)1 балл
-
Вот еще один лайфхак: Меняем во всех файлах RenderDX11 с единицы на ноль. Обработка частиц с видюхи уйдет на процессор. Дает крутой буст фпс во время дождя. С такой настройкой я смог в ВР включить SSR Low, немного поигрался с контрастностью, яркостью, и лужи стал видеть лучше. МАСТХЕВ!1 балл
-
1 балл
-
Он ШИКАРЕН. Это копия Тиллета. Не совсем стандартный ковш. Садишься в него и спина с ним сливается. Он повторяет анатомию. Куча реальных джиперов/баггистов/дрифтеров покупающих эти ковши у Николая не могут ошибаться.1 балл
-
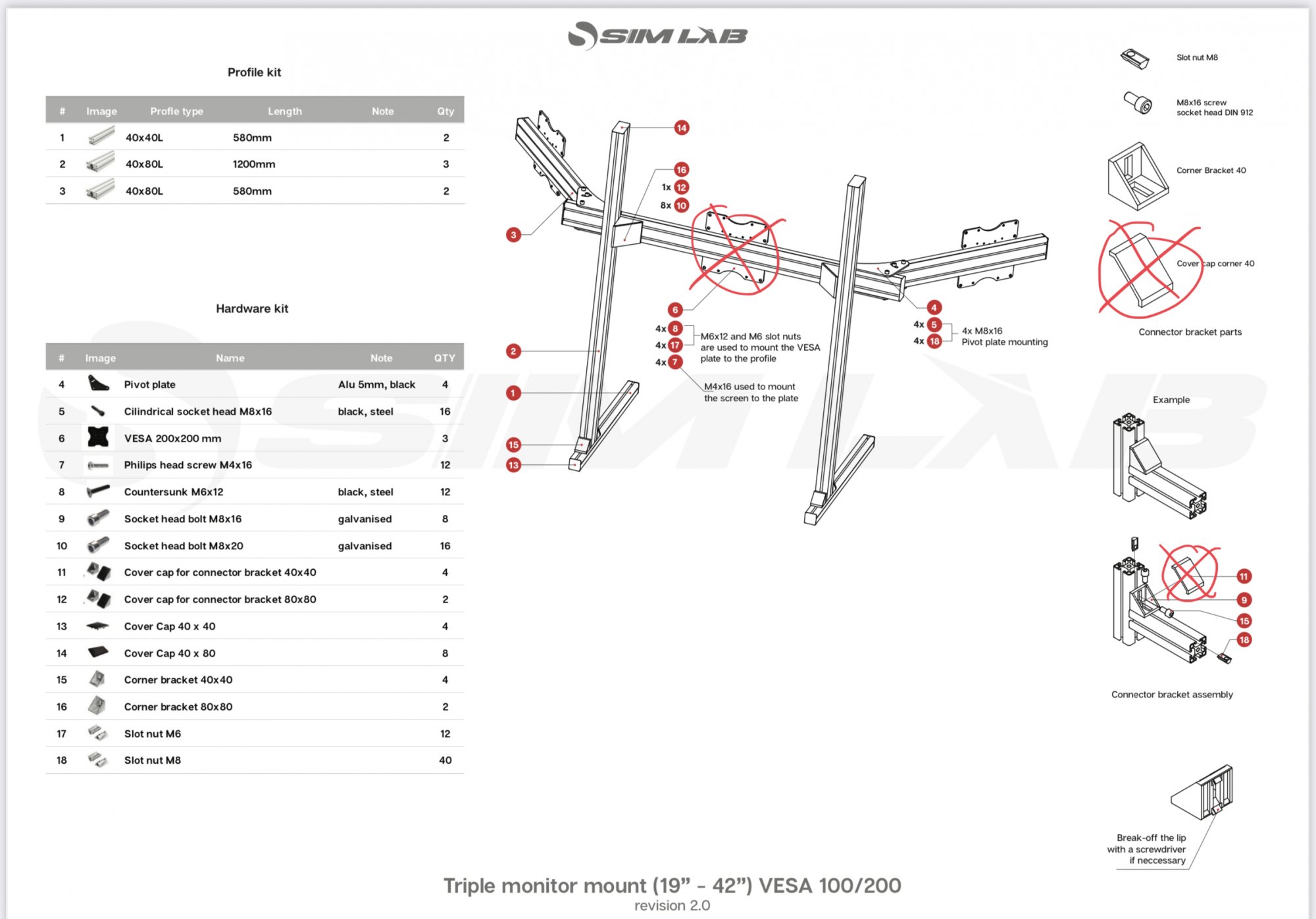
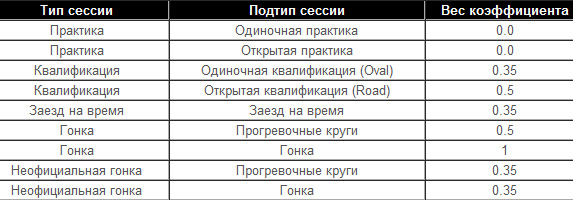
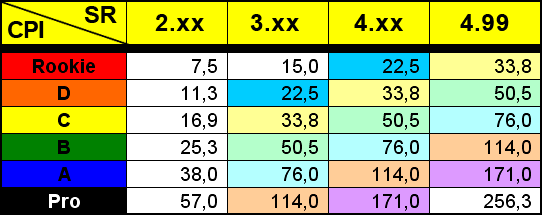
В основе iRacing заложено не только моделирование автогонок, но и фактически имитация карьерного продвижения гонщика. Большое внимание в онлайн соревнованиях iRacing уделяется их безопасности. Как и в реальном мире, все новички начинают свою карьеру с простых автомобилей. И только после их освоения и выполнения некоторых минимальных требований, могут повысить класс своей лицензии, которая раскрывает двери в более серьезные соревнования. Кроме того, все гоночные дисциплины разбиты на две основных категории - овальные гонки, и шоссейные кольцевые (дорожные) гонки. Обе категории никак не связаны между собой и имеют отдельные лицензии. За каждым классом лицензии (в каждой категории, Oval или Road), закреплен свой диапазон Рейтинга Безопасности от 0.00 до 4.99. Каждый пилот имеет две лицензии – одну для овальных гонок и другую для дорожных гонок. Развивать можно каждую лицензию в отдельности или обе одновременно. В настоящее время действует семь уровней лицензий, как для овальных, так и для дорожных гонок, каждая лицензия кроме названия имеет и свой цвет: Определяющим рейтингом игрока является степень безопасности его вождения – Safety Rating или рейтинг безопасности. При покупке подписки на симулятор выдается лицензия уровня "Rookie". Эта лицензия позволяет участвовать только в соревнованиях начального уровня, в которых не указан уровень рейтинга безопасности. По мере того как вы будете участвовать в гонках, вам будут начисляться или отнимать очки рейтинга безопасности. Значение рейтинга безопасности зависит от количества допущенных вами ошибок за время сессии: выезд за пределы трассы – 1 штрафное очко, потеря контроля над автомобилем или разворот – 2, жесткий контакт или столкновение с автомобилем соперника – 4. Для получения каждой новой лицензии (кроме Pro) необходимо выполнить минимальные требования, которые называются MPR (Minimum Participation Rating). Для выполнения MPR пилоту необходимо проехать 4 официальных гонки или 4 гонки на время (Time Trial) в серии текущей лицензии (т.е. для получения класса С нужно проехать 4 гонки на машине чемпионата класса D) и иметь рейтинг безопасности не ниже 3.0 на момент лицензионного продвижения. Если же рейтинг безопасности 4.0 или выше и выполнены остальные требования MPR, то уровень лицензии повышается незамедлительно. При переходе через целое значение (2.0, 3.0, 4.0), как вверх, так и вниз, к заработанному рейтингу дополнительно добавляется +0.4 по модулю. Допустим до гонки Ваш рейтинг был равен 2.95, в гонке Вы заработали 0.06, в итоге Ваш рейтинг после гонки станет 3.41 (2.95+0.06+0.40). При понижении через целые значения те же 0.40 отнимаются. Например, до гонки Ваш рейтинг был 3.05, в гонке Вы потеряли -0.06, в итоге после гонки Ваш рейтинг будет равен 2.59 (3.05-0.06-0.40). Коэффициент значимости Инцидентов Как уже было сказано выше, на первом месте в соревнованиях iRacing ставится безопасное вождение, при этом сопоставляются друг с другом, разные типы сессий, когда инциденты непосредственно могут затронуть больше чем одного гонщика, понятно, что безопасное вождение в гонках имеет большую ценность, нежели квалификации или в одиночной гонке на время. В силу этого, введен коэффициент значимости инцидента, который применяется, когда в среднем подсчитывается рейтинг безопасности за сессию. Следует заметить, что инциденты подсчитываются на протяжении всей сессии, включая даже пост-гоночный период времени, после окончания гонки, когда был показан клетчатый флаг. Так что пересекая финишную черту не следует "крутить жука" и тем более врезаться в стены или соперников, а нужно аккуратно остановиться на трассе и перейти в режим зрителя. Обратите внимание, что с каждым следующим классом лицензии, требования к безопасности вождения немного увеличиваются. Если у вас класс D и ваш SR равен 4.5, то при переходе в класс C, ваш SR будет равен уже 3.5. Другими словами, отличный рейтинг безопасности класса D является всего лишь хорошим рейтингом для класса С. По мере вашего продвижения по карьерной лестнице, необходимо постоянно уделять внимание безопасности вашего вождения, что, впрочем, со временем будет проще и проще, так как ваш опыт будет расти, а навыки - развиваться. Большое количество людей воспринимают рейтинг безопасности слишком серьезно: на самом деле сотые его значения не имеют большого влияния (как и десятые, честно говоря), а всего лишь дают представление о вашем вождении в конце каждой сессии. Поэтому очень важно привить себе правильное отношение к вашему рейтингу безопасности и избежать столь присущего нам стремления к его постоянному увеличению. Приведу цитату из статьи Дейва Кеммера про систему рейтинга безопасности: “Если ваш SR равен или меньше 2 (двух), то вам необходимо остудить пыл, менее агрессивно бороться за позиции или их сохранение и сфокусироваться на безопасности своего вождения - победы не убегут. Если ваш SR больше 4 (четырех) – вы прекрасно справляетесь с автомобилем, поэтому можно немного «поднажать». И, наконец, если значение вашего SR находится районе 3 (трех) – вы нашли правильный баланс”. В дальнейшем этот рейтинг будет двигаться в направлении того значения, которое наиболее точно отражает уровень безопасности вашего вождения, вне зависимости от постигающих вас удач или неудач. Всегда пользуйтесь приведенным правилом при оценке своего рейтинга безопасности (2 – остудите пыл, 3 – хорошая работа, 4 – поднажмите немного). Начисление очков рейтинга безопасности Рейтинг Безопасности - измеряет общую безопасность вождения и вычисляется по формуле, в которой принимается во внимание число пройденных поворотов, число и серьезность инцидентов в сессии, а также текущий уровень лицензии пилота. На данном графике демонстрируется цена каждой ошибки в зависимости от уровня лицензии. Например, для лицензии уровня С4.0 как и для B3.0 цена одного инцидента 50 поворотов. Т.е. получив в гонке 1 инцидент необходимо проехать 50 поворотов чтобы рейтинг безопасности остался на том же уровне. Таблица ниже показывает соотношение между CPI (поворотов на один инцидент), полученного из графика выше, и SR (рейтинг безопасности) для всех уровней лицензии. Используя эту таблицу можно определить будет ли рейтинг, полученный в гонке, положительным или отрицательным. Для этого количество поворотов делится на количество инцидентов в гонке, если полученное число меньше норматива для определенного уровня лицензии, то рейтинг уменьшится.
1 балл
-
Нет, мгновенно ничего не делается )) Самое главное, что серийная модель и самоделка - это две большие разницы. Выше вот ссылка на nema34 - $100. Но ему же еще энкодер нужен. Какой-ть нормальный на 40k ppr - еще примерно $100. Как крепить его на движок? В серийке никакой кустарщины не сделаешь, значит нужен движок тоже кастомный, еще баксов $50 накиньте Дальше электроника - как заметил ОР нормальных драйверов под BDLC/PMSM еще поискать, т.е. их нет. Причем надо сделать что-то не максимально дешманско дешевое как на Алике, а хоть с небольшим запасом по прочности. А то юзера постоянно то вентилятор "слишком шумящий" отключить пытаются, то в 220V включают то, что на 120V рассчитано, то еще какую-ть хрень придумают. В общем надо предусмотреть побольше всяких вариантов и от всего заложить защиту, иначе потом на гарантийном обслуживании разоришься. Сама часть ФФБ контроллера, которая мозг, в оборудовании может и попроще, но тут уже свою нюансы в программировании. Найдите какую-ть мелкую контору, которая это все разработает, да и сопровождать потом будет, баги исправлять, перламутровые пуговицы по желанию юзеров прикручивать. Стоимость сильно варьируется от страны проживания этой конторы, какие-ть индусы наверно подешевле будут , но где гарантия, что через 3 месяцев не исчезнут? Поэтому наверно лучше американцы/германцы, да пусть подороже но зато свои и под боком, хоть законы свои американские/германские на них действуют если что. (это я с точки зрения создателей АФ/Фанатека пытаюсь рассуждать))) Сколько тут уже выходит просто себестоимость? По моим ламерским прикидкам уже баксов на 500 набежало. А всякие там патенты/лицензии? За ФФБ заплати, за USB заплати, там и сям по мелочи. Дальше нужно накинуть на всякие непредвиденные расходы типа брака комплектухи, на переделку ошибок в дизайне, обслуживание гарантийных случаев и т.д. и т.п. Это не от жадности, а просто чтобы не разорится в случае чего. На ировском форуме не читали душещипательные истории как загнулись начинания по выпуску педалей у DSD и MPCC? Это вот примерно из этой оперы о нехватке бабла на покрытие внезапных издержек. Как только все закончили и выпустили продукт на рынок - надо начинать сначала )) Я имею ввиду разрабатывать следующую версию. Т.к. текущая через год-два уже так устареет, что никому не нужна будет. Все очень быстро развивается, поэтому надо постоянно в RND вкладывать, иначе задавят конкуренты Но самое имхо главное - никому эти рули не нужны )) ниша такая узкая, что спрос мизерный. Нельзя сделать много и дешево, т.к. их не продать. Остается делать дорого (относительно), чтоб хоть какой-то смысл был. Поэтому их в основном энтузиасты любители своего дела и выпускают, не знаю уж ради денег или ради удовольствия ))1 балл
-
0 баллов
-
В дрифта скорости лоджитеки хватит за глаза0 баллов
-
@Dy6ACuM Стим вроде можно пополнить с кошелька операторов сотовой связи, во всяком случае у мегафона есть такая возможность.-1 балл






.thumb.JPG.521fa42d5b72ef9eb5782397aef0af17.JPG)