Поиск
Показаны результаты для тегов 'diy'.
Найдено 25 результатов
-
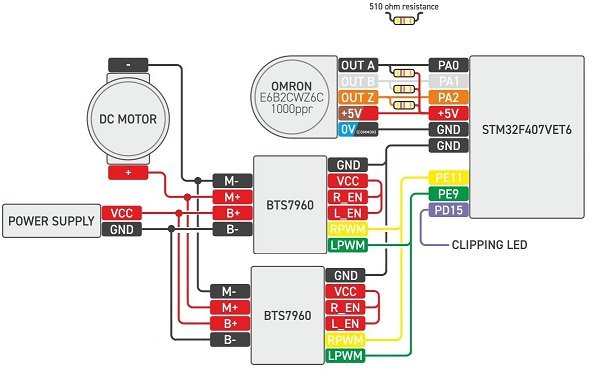
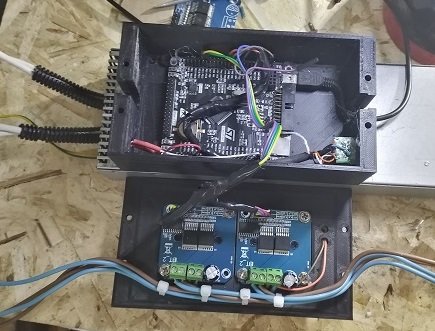
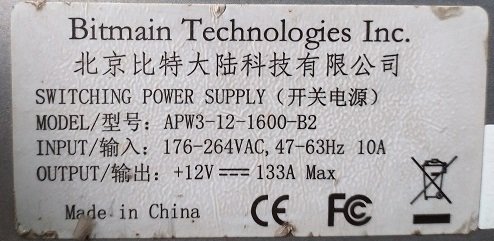
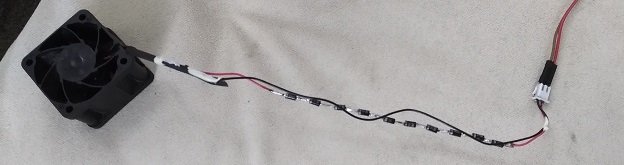
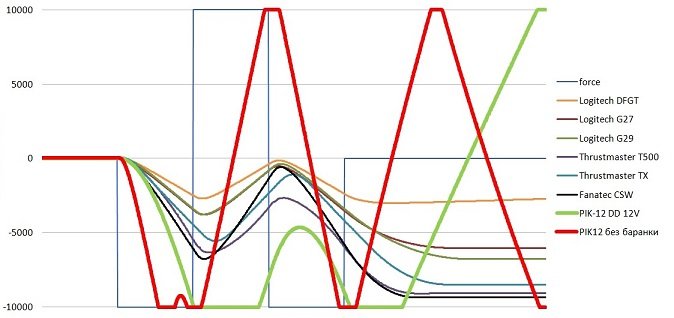
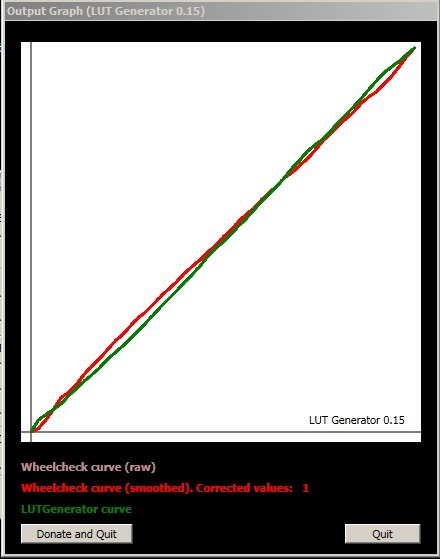
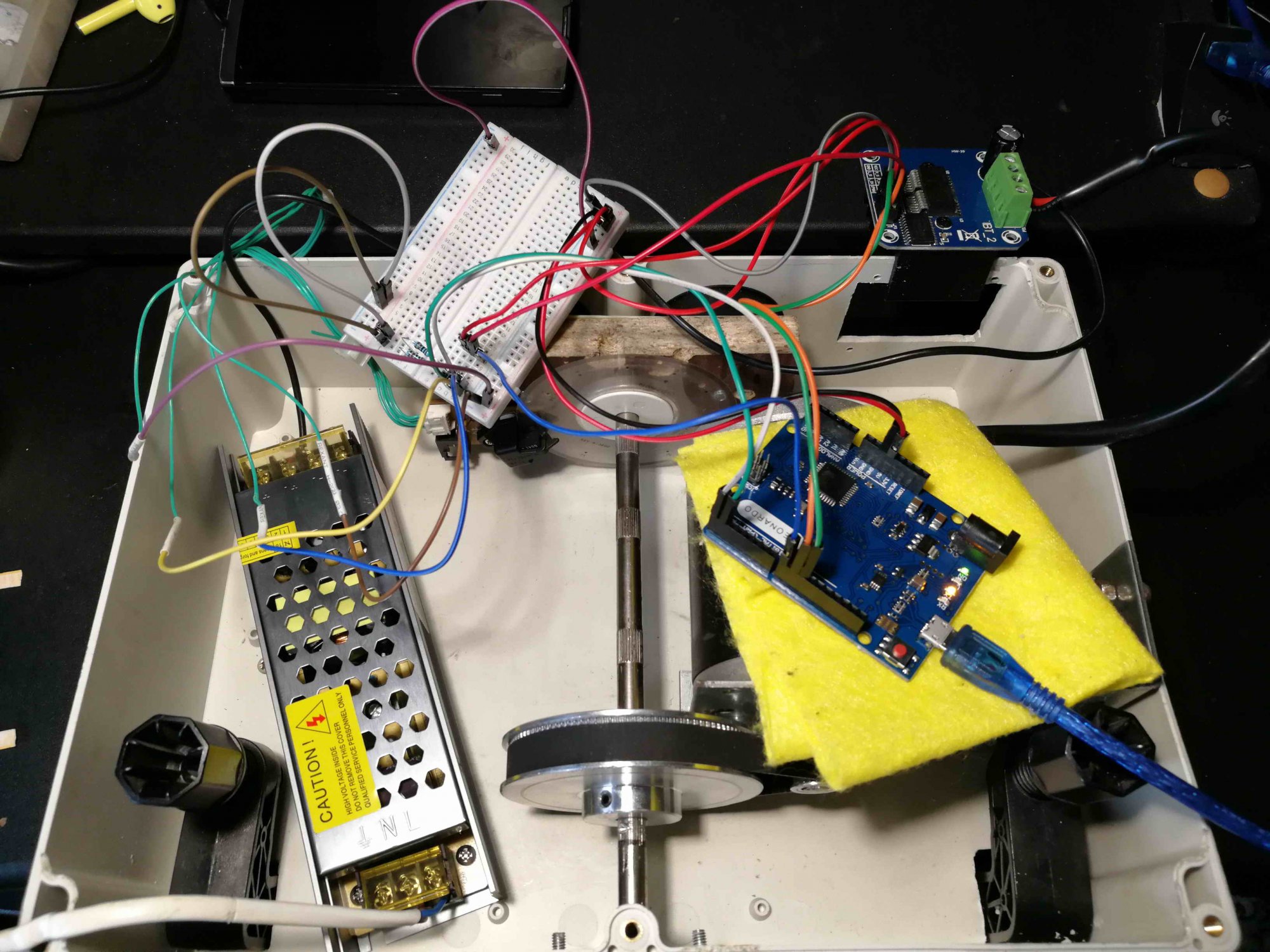
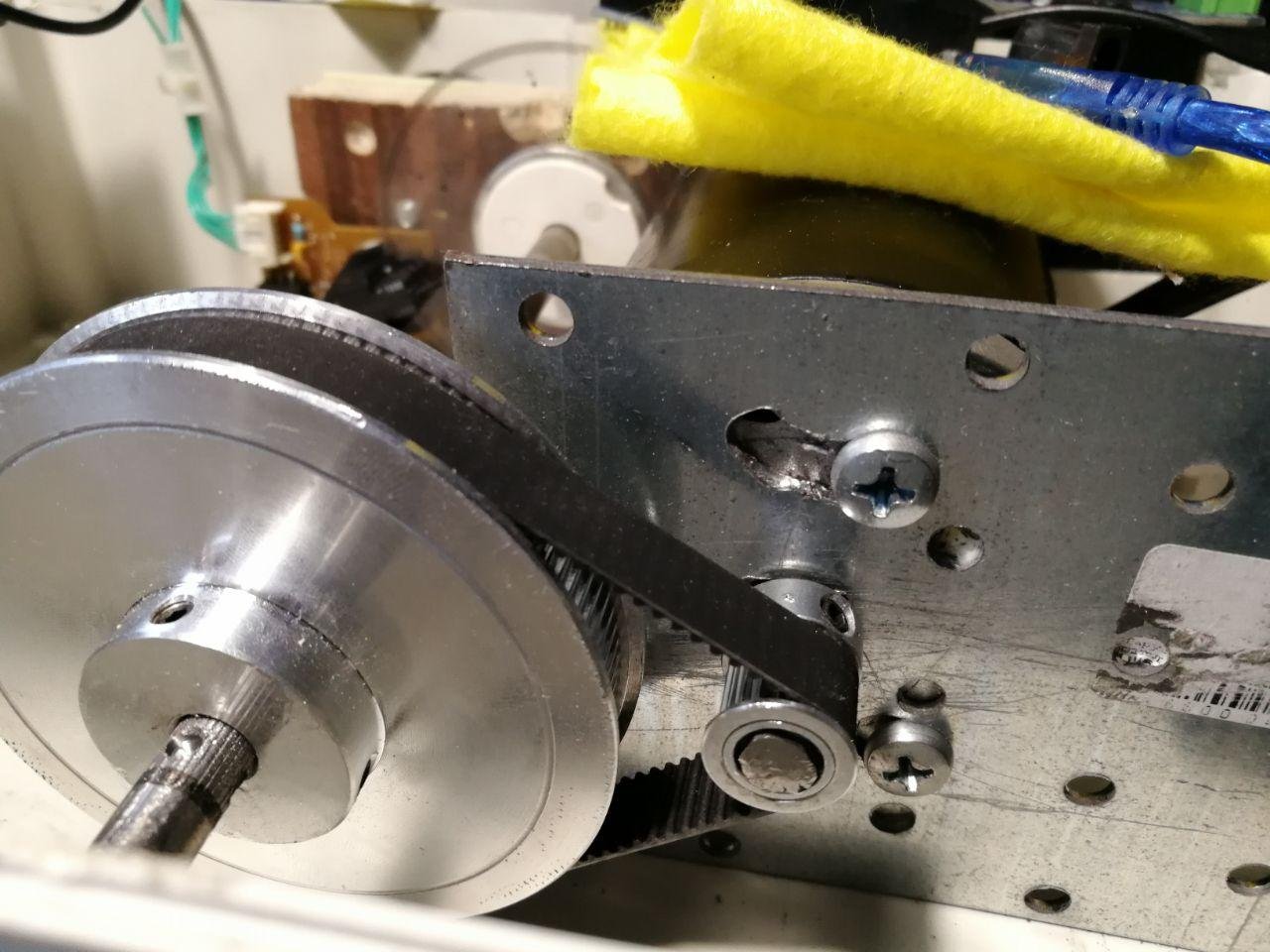
 Всем привет, решил я создать отдельную тему под свой проект, перед началом я бы хотел выразить благодарность за технические консультации следующим пользователям портала: @Caravangoes @DarkGracius ну что, погнали! :) в поисках б/у коллекторного мотора постоянного тока типа MY1020 ну и "подобных", совершенно случайно наткнулся на Болгарский двигатель PIK-12 3/10-1 в состоянии почти нового, и после консультаций с @DarkGracius и изучении его темы на подобном моторе https://forum.simracing.su/topic/3830-narodnyy-directdrive-na-motorah-postoyannogo-toka/ был начат свой проект со своим видением прекрасного :) задняя крышка была просверлена для установки корпуса/держателя энкодера (omron 600 ppr) вал просверлен сверлом на 5мм, нарезана резьба м6, вкручена шпилька для соединения с муфтой энкодера, корпус/держатель энкодера напечатан на 3д принтере заменил штатные провода на мотор (использовал кабель КГхл 2х4мм) для крпеления мотора в гараже был найден "маленький" уголок 75х75х6 мм выпелен, просверлен и покрашен на вал мотора установлена 3д печатная быстросъемная муфта быстросъемная муфта представляет из себя разрезанное шлицевое соединение, сжимаемое зажимом-эксцентриком ну и для "+15 лошадей" мотор был обтянут пленкой под карбон на этот "настольная" часть была закончена от мотора идет жгут проводов (силовой кабель на мотор и экранированый кабель на энкодер) к блоку управления блок управления собран на МК STM32 и 2х BTS 7960 //тут меня сейчас закидают какашками, но я не подключал скрутку VCC+R_EN+L_EN к +5В - это дало эффект, что когда FFB=0 руль "абсолютно висит в воздухе" и вращается свободно без сопротивления, если же подать постоянное питание на эту скрутку, то обмотки мотора закорачиваются Н-мостами и не дают ему так свободно вращаться - еще раз повторюсь разница есть когда отсутвует выходный сигнал FFB// корпус блока так же напечатан на 3д принтере ] мощный блок питания был куплен у товарищей майнеров тока у него конечно с запасом... он сильно шумел вентилятором, и на скорую руку было сделано колхозное решение для уменьшения шума вентилятора, путем уменьшения его напряжения с 12 до 4 Вольт (сильно не смеяться) ] над коробкой с STM32 и BTS установил вентилятор чтобы вентилятор не работал постоянно, между ребер BTS вставил термостат KSD9700 с включением на 50 градусах ну и эта коробка установлена верхом на блоке питания спереди на коробке "clipping led" сзади разъем RJ45 для подключения энкодера и USB шнурок для подключения к ПК следом за коробкой поставил розетку РС-102 для подключения кабеля на мотор ну вроде пока все... если что забыл - спрашивайте замеры максимального момента (софт лок) дали усилие 10кг на рычаге 81мм (8,1 НМ) графики степ теста c баранкой (китай 320мм) и без: /руль после выключения FFB не останавливается т.к. как я говорил выше - мосты отключатся и он болтается несколько раз между софт локами/ график линейности усилия продолжение следует)
Всем привет, решил я создать отдельную тему под свой проект, перед началом я бы хотел выразить благодарность за технические консультации следующим пользователям портала: @Caravangoes @DarkGracius ну что, погнали! :) в поисках б/у коллекторного мотора постоянного тока типа MY1020 ну и "подобных", совершенно случайно наткнулся на Болгарский двигатель PIK-12 3/10-1 в состоянии почти нового, и после консультаций с @DarkGracius и изучении его темы на подобном моторе https://forum.simracing.su/topic/3830-narodnyy-directdrive-na-motorah-postoyannogo-toka/ был начат свой проект со своим видением прекрасного :) задняя крышка была просверлена для установки корпуса/держателя энкодера (omron 600 ppr) вал просверлен сверлом на 5мм, нарезана резьба м6, вкручена шпилька для соединения с муфтой энкодера, корпус/держатель энкодера напечатан на 3д принтере заменил штатные провода на мотор (использовал кабель КГхл 2х4мм) для крпеления мотора в гараже был найден "маленький" уголок 75х75х6 мм выпелен, просверлен и покрашен на вал мотора установлена 3д печатная быстросъемная муфта быстросъемная муфта представляет из себя разрезанное шлицевое соединение, сжимаемое зажимом-эксцентриком ну и для "+15 лошадей" мотор был обтянут пленкой под карбон на этот "настольная" часть была закончена от мотора идет жгут проводов (силовой кабель на мотор и экранированый кабель на энкодер) к блоку управления блок управления собран на МК STM32 и 2х BTS 7960 //тут меня сейчас закидают какашками, но я не подключал скрутку VCC+R_EN+L_EN к +5В - это дало эффект, что когда FFB=0 руль "абсолютно висит в воздухе" и вращается свободно без сопротивления, если же подать постоянное питание на эту скрутку, то обмотки мотора закорачиваются Н-мостами и не дают ему так свободно вращаться - еще раз повторюсь разница есть когда отсутвует выходный сигнал FFB// корпус блока так же напечатан на 3д принтере ] мощный блок питания был куплен у товарищей майнеров тока у него конечно с запасом... он сильно шумел вентилятором, и на скорую руку было сделано колхозное решение для уменьшения шума вентилятора, путем уменьшения его напряжения с 12 до 4 Вольт (сильно не смеяться) ] над коробкой с STM32 и BTS установил вентилятор чтобы вентилятор не работал постоянно, между ребер BTS вставил термостат KSD9700 с включением на 50 градусах ну и эта коробка установлена верхом на блоке питания спереди на коробке "clipping led" сзади разъем RJ45 для подключения энкодера и USB шнурок для подключения к ПК следом за коробкой поставил розетку РС-102 для подключения кабеля на мотор ну вроде пока все... если что забыл - спрашивайте замеры максимального момента (софт лок) дали усилие 10кг на рычаге 81мм (8,1 НМ) графики степ теста c баранкой (китай 320мм) и без: /руль после выключения FFB не останавливается т.к. как я говорил выше - мосты отключатся и он болтается несколько раз между софт локами/ график линейности усилия продолжение следует)
- 731 ответ
-
- 10
-

-

-
- mmos
- direct drive
- (и ещё 2 )
-

DIY FFB steering wheel
Caravangoes опубликовал тема в Всё для симрейсинга - Рули, сиденья, железо для ПК
Приветствую, уважаемые коллеги по интересам! Заметил, что на форуме начали появляться и обсуждаться проекты самодельных FFB рулей. Тема для меня очень интересная по нескольким причинам: 1) Мой G27 по мере глубокого погружения в симуляторы перестал меня устраивать по некоторым параметрам, а если точнее, то по всем. 2) Постоянно у меня руки чешутся - дай чего придумать и смастерить. Решение первого пункта для многих очевидно: покупаем топовый девайс и всё сразу станет хорошо. Но это не наш метод. Руки-то чешутся, а амбиции зашкаливают. Потому хочу представить общественности свой скромный проект: В качестве управляющей электроники решено было использовать плату STM32 discovery board с прошивкой MMOS FFB Думаю, для многих не секрет, что наши немецкие коллеги-энтузиасты уже давно сделали и обнародовали схемы и прошивку для STM32, которая после легла в основу ПО для Simucube OSW. STM32 с данной прошивкой может легко организовать нам фидбэк посредством двигателя постоянного тока через соответствующий драйвер (H-Bridge) В качестве привода FFB будем использовать сервомотор постоянного тока 24v (DC servo motor) с отрезанным энкодером. Энкодер вместе с его корпусом отрезал за ненадобностью, т.к. привод будет не прямой, а с редукцией и осуществляться будет посредством ремня. Почему именно такой мотор? Так сложились звёзды. Таких мотора у меня два, достались они совершенно бесплатно в состоянии - муха не сидела. Низкооборотистый и очень моментный мотор. Без нагрузки при 24v прибор насчитал 940rpm. Диаметр мотора 80мм. Управлять этим маленьким моторчиком поручено драйверу bts7960 - подходящие характеристики и доступная цена. Единственный момент: нужно брать оригинал, неоригинал за $5 очень сильно греется и весело горит. Чтобы симулятор понимал, на какой угол повёрнут наш руль, следить за ним будем с помощью роторного энкодера, который будет установлен непосредственно на вал рулевого колеса. Используем китайскую копию OMRON E6B2CWZ6C 1000ppr (что означает 4000cpr) с индексом, для того, чтобы наша база запоминала центр и при каждом включении калибровалась. Для механики привода будем использовать то, что уже имеется - пару алюминиевых шкивов HTD3M 20t и 72t под ремень 15мм. Мои очень примерные расчёты подсказывают, что такое соотношение должно подойти и по скорости и по мощности. А если вдруг что-то пойдёт не так - будем варьировать диаметром ведущего шкива, благо есть в наличии 12t, 15t, 20t, 22t, 24t. Ремешок используем с кевларовым кордиком, т.к. из-за относительно небольшого диаметра ведомого шкива работа ремешку предстоит нелёгкая. Для сборки с ведущим шкивом 20t понадобится ремень на 96 зубов - HTD3M 288. Остальная механическая часть - дюраль и амг. Будет много токарки и фрезеровки. Дабы убедиться в том, что принципиальная схема с использованием платы, энкодера, драйвера и мотора будет работать правильно, нужно было собрать макет. На коленке, с использованием механики очень старого trust ff380, его родного моторчика была собрана принципиальная связка компонентов, которая (не без бубна и танцев) заработала как полагается. Осталось дело за малым - воспроизвести всё в соответствие с чертежами.- 3127 ответов
-
- 24
-
-
-
 Всем привет! Недавно закончил сборку платформы SFX-100 (https://opensfx.com/) и начал искать русскоязычное сообщество владельцев, но гугл ничего не нашел. Либо они хорошо скрываются, либо просто еще не дошла волна. Интересно, есть обладатели на форуме? Хотел проконсультироваться по некоторым вопросам и нюансам эксплуатации. Так же если у вас есть вопросы по платформе или сборке, готов ответить.
Всем привет! Недавно закончил сборку платформы SFX-100 (https://opensfx.com/) и начал искать русскоязычное сообщество владельцев, но гугл ничего не нашел. Либо они хорошо скрываются, либо просто еще не дошла волна. Интересно, есть обладатели на форуме? Хотел проконсультироваться по некоторым вопросам и нюансам эксплуатации. Так же если у вас есть вопросы по платформе или сборке, готов ответить.- 48 ответов
-
- 2
-
-
- motion platform
- simfeedback
- (и ещё 2 )
-
 За основу взято прочитанное и увиденное на различных зарубежных форумах. В основном руководствовался видео от Caravangoes и AgaYuditra на youtube. Для сборки было приобретено: Пластиковый короб 290х210х100. Асинхронный коллекторный двигатель 24 вольта\100 ватт. Два алюминиевых шкива GT2 в комплекте с ремнём. Передаточное отношение 1:8. Arduino Leonardo, BTS7960b и макетная плата на липучке. Всё перечисленное от завода WAVGAT. Вал 8 мм. Достал из древнего принтера HP Jet 2000. Энкодер оптический + диск к нему. Из того же древнего принтера. Струбцины пластиковые. Извлёк из никому не нужного Logitech Wingman Formula. Рулевое колесо снял с того же Wingman. Импульсный блок питания 24 вольта\4.2 ампера. Модель APS-100LN-24BM. 120 проводков с коннекторами для плат прототипирования. Заглушка от ручки замка двери Запорожца для "переднего" подшипника в корпусе базы. Первоначально для теста использовалась прошивка Ai Wave 2016. Плата исправно получала данные с энкодера, однако версия прошивки платы в момент запуска утилиты определялась через раз, либо не определялась вовсе. Дополнительные неудобства создавал мотор. При значении Main Gain 100% мотор невозможно сдвинуть с места (логично, мотор 100 ваттный). При уменьшении Main Gain появляется возможность провернуть его ровно настолько, насколько я снизил уровень Main Gain. При снижении до 80% и ниже руль становился "пустым" в середине, однако при установке Main Gain 100% руль снова возвращался в центр. Изрядно намучившись с утилитой Ai Wave, переставшей определять версию прошивки (теперь уже совсем), но по прежнему получавшей данные с энкодера, я решил от неё отказаться в пользу ПО от EbolzMagy. Вся дальнейшая работа планируется только с ней. Утилита установлена, прошивка залита в плату. Arduino Leonardo определяется как устройство ввода "EMC" с обилием кнопок (гипотетически подключенных) и осью руля. И вот теперь самое странное. Подключение энкодера от принтера я изменил согласно приложенной WIRING схеме (содержится в архиве от автора ПО). Я вижу что плата никакой информации от энкодера не получает, однако он запитан, пять вольт на него приходит, свечение в оптике видно невооружённым глазом. Мотор так же молчит. Вращение вала не встречает никакого сопротивления, показаний в утилите EMC Utility Lite нет. На текущий момент подключение выглядит так:
За основу взято прочитанное и увиденное на различных зарубежных форумах. В основном руководствовался видео от Caravangoes и AgaYuditra на youtube. Для сборки было приобретено: Пластиковый короб 290х210х100. Асинхронный коллекторный двигатель 24 вольта\100 ватт. Два алюминиевых шкива GT2 в комплекте с ремнём. Передаточное отношение 1:8. Arduino Leonardo, BTS7960b и макетная плата на липучке. Всё перечисленное от завода WAVGAT. Вал 8 мм. Достал из древнего принтера HP Jet 2000. Энкодер оптический + диск к нему. Из того же древнего принтера. Струбцины пластиковые. Извлёк из никому не нужного Logitech Wingman Formula. Рулевое колесо снял с того же Wingman. Импульсный блок питания 24 вольта\4.2 ампера. Модель APS-100LN-24BM. 120 проводков с коннекторами для плат прототипирования. Заглушка от ручки замка двери Запорожца для "переднего" подшипника в корпусе базы. Первоначально для теста использовалась прошивка Ai Wave 2016. Плата исправно получала данные с энкодера, однако версия прошивки платы в момент запуска утилиты определялась через раз, либо не определялась вовсе. Дополнительные неудобства создавал мотор. При значении Main Gain 100% мотор невозможно сдвинуть с места (логично, мотор 100 ваттный). При уменьшении Main Gain появляется возможность провернуть его ровно настолько, насколько я снизил уровень Main Gain. При снижении до 80% и ниже руль становился "пустым" в середине, однако при установке Main Gain 100% руль снова возвращался в центр. Изрядно намучившись с утилитой Ai Wave, переставшей определять версию прошивки (теперь уже совсем), но по прежнему получавшей данные с энкодера, я решил от неё отказаться в пользу ПО от EbolzMagy. Вся дальнейшая работа планируется только с ней. Утилита установлена, прошивка залита в плату. Arduino Leonardo определяется как устройство ввода "EMC" с обилием кнопок (гипотетически подключенных) и осью руля. И вот теперь самое странное. Подключение энкодера от принтера я изменил согласно приложенной WIRING схеме (содержится в архиве от автора ПО). Я вижу что плата никакой информации от энкодера не получает, однако он запитан, пять вольт на него приходит, свечение в оптике видно невооружённым глазом. Мотор так же молчит. Вращение вала не встречает никакого сопротивления, показаний в утилите EMC Utility Lite нет. На текущий момент подключение выглядит так:
-
 Всем привет! Это мой первый проект на этом форуме и в целом первый проект связанный с симрейсингом. Сразу извиняюсь за мой русский, так как не являюсь Чистым русским. Уже как пол года наблюдаю за всем сим движением и наконец то решился на руль, но так как я не ищу лёгких путей, буду делать его сам. Значит, начитавшись всяких форумах и тут и на зарубеже, понял что мне надо стм плату, нормальный энкодер, нормальние моторы и драйвера. Вроде голова на месте, так что можно и сделать что-то по сложнее чем просто энкодер который считывает повороты. Уже первые макеты у меня есть и первые проблемы тоже. Значит проблематика: 1) энкодер двух фазный. С этим будут проблемы? Или только по калибровке вопросы и всё? 2)stm32vet6 у меня походу не ориг, и не понимаю надо через ст линк прошивать или нет, потому что через usb комп не может разпознать, может кто-то чем то может помочь. Как моторы пока что выбрал моторы от машины, от стеклоподёмников. Пока что задуманно 2 мотора через зубчатый ремень, но если силы не хватит добавлю ещё 2. Вот как то так пока что выглядит, что скажете? P.S. Завтра сделаю апдейт и добавлю фотки, показывают что у них слишком большой размер.
Всем привет! Это мой первый проект на этом форуме и в целом первый проект связанный с симрейсингом. Сразу извиняюсь за мой русский, так как не являюсь Чистым русским. Уже как пол года наблюдаю за всем сим движением и наконец то решился на руль, но так как я не ищу лёгких путей, буду делать его сам. Значит, начитавшись всяких форумах и тут и на зарубеже, понял что мне надо стм плату, нормальный энкодер, нормальние моторы и драйвера. Вроде голова на месте, так что можно и сделать что-то по сложнее чем просто энкодер который считывает повороты. Уже первые макеты у меня есть и первые проблемы тоже. Значит проблематика: 1) энкодер двух фазный. С этим будут проблемы? Или только по калибровке вопросы и всё? 2)stm32vet6 у меня походу не ориг, и не понимаю надо через ст линк прошивать или нет, потому что через usb комп не может разпознать, может кто-то чем то может помочь. Как моторы пока что выбрал моторы от машины, от стеклоподёмников. Пока что задуманно 2 мотора через зубчатый ремень, но если силы не хватит добавлю ещё 2. Вот как то так пока что выглядит, что скажете? P.S. Завтра сделаю апдейт и добавлю фотки, показывают что у них слишком большой размер. -
Деревянный лучше чем никакой (DIY)
Гость опубликовал тема в Всё для симрейсинга - Рули, сиденья, железо для ПК
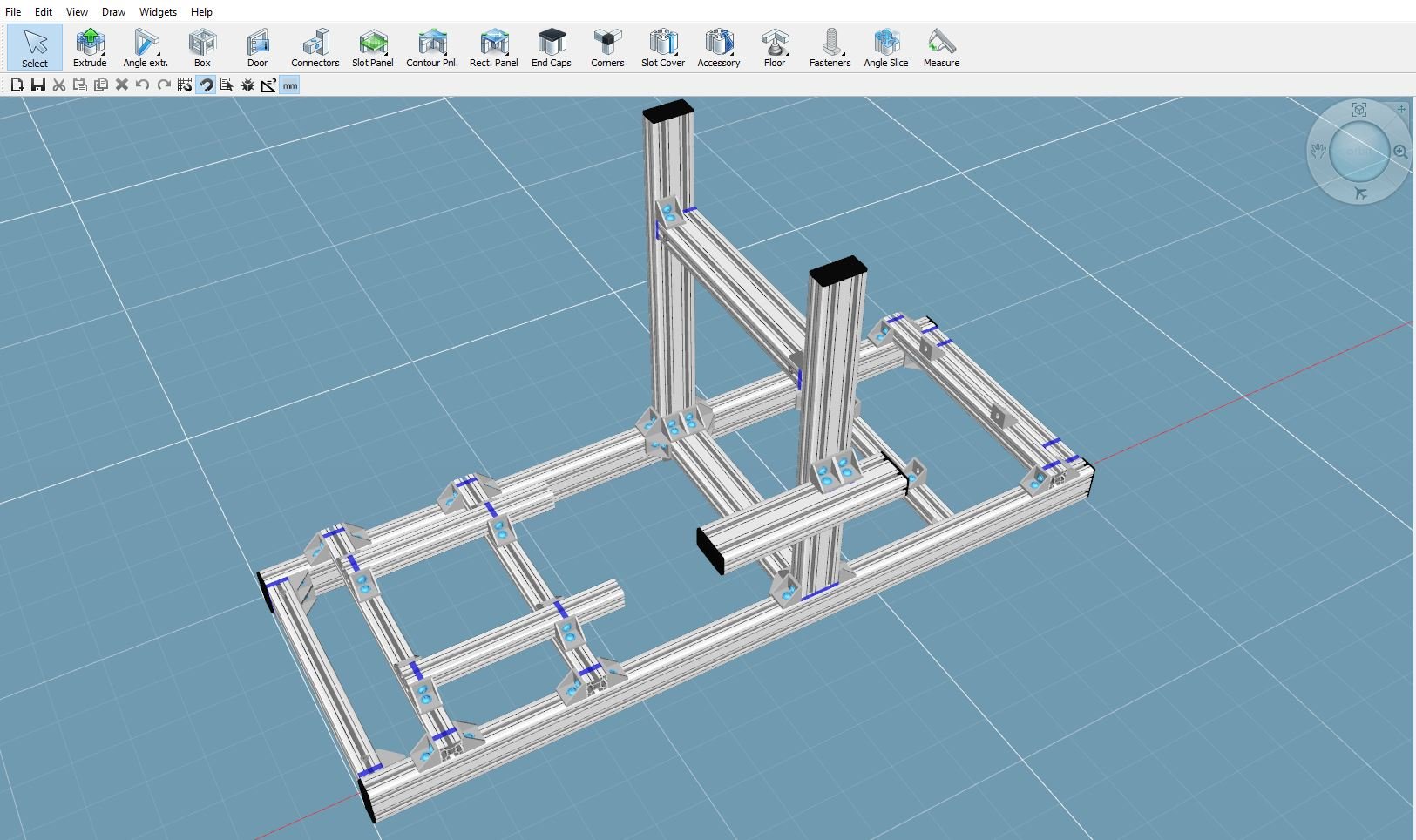
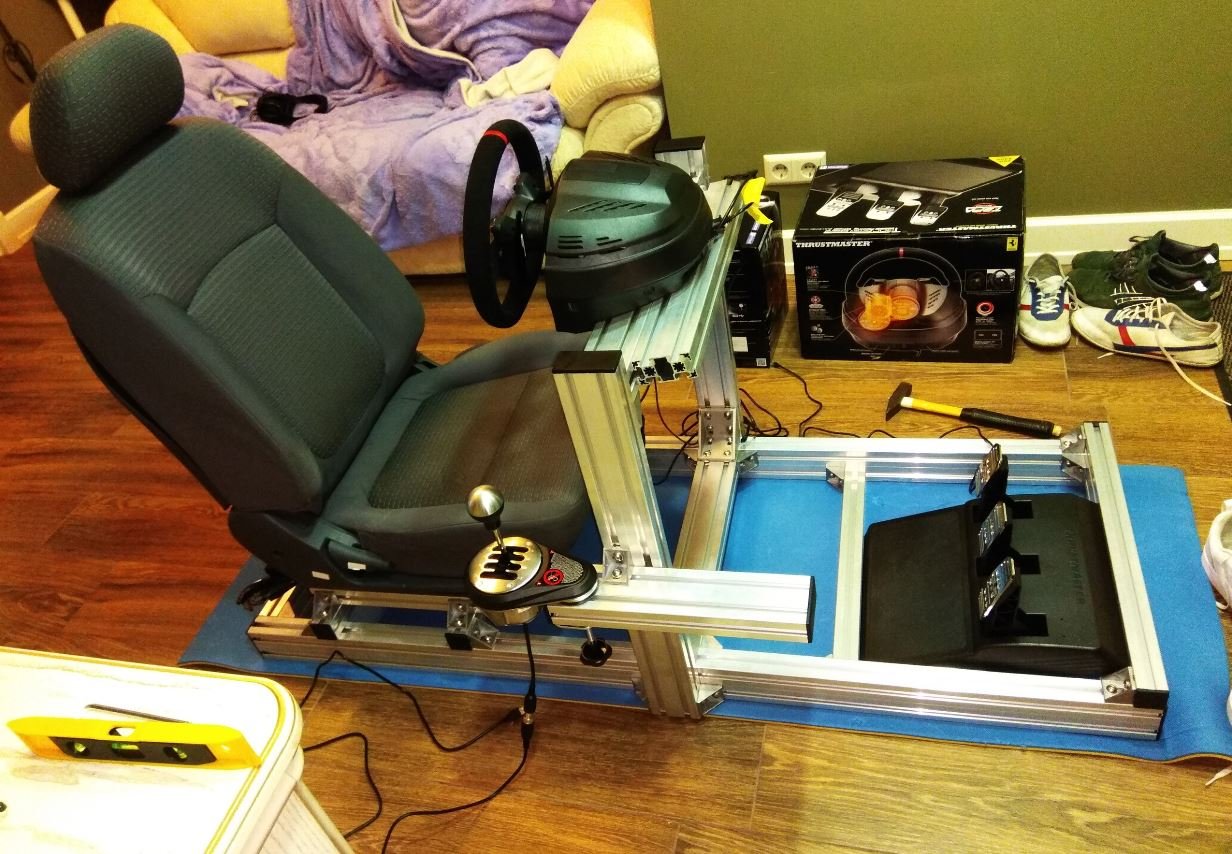
С чего все началось https://drive.google.com/file/d/1FU9REUxzBuZPfb7gi_y3ULu7X9Eak4j2/view?usp=sharing А все началось с простого руля подаренного другом, momo. На тот момент у меня уже был VR (oculus quest 2) и я подумал что если совместить симулятор гонок и VR должно получится просто супер, поискал игры и выбрал ACC, опустим историю с настройками и прочими танцами с бубном в итоге игра зашла и я начал рубится а нее спустя часов 40 пришло осознание что мой холявный руль никуда не годится и было принято решения заменить его на православный Т300. На авито был закуплен новый руль с педалями, проехавшись на новом оборудовании я сразу понял что оборудование решает, совсем другие ощущения от езды и конечно же гораздо лучший результат, дальше больше, руль меня полностью устраивал и я решил что можно улучшить педальки, на замену T3PA были выбраны китайские simjack pro. Новые гаджеты новые проблемы, неожиданно оказалось что педали требуют довольно внушительных сил для нажатия на них от чего мое офисное кресло которое на колесиках просто тупо уезжало )))) как временное решение решил привязать стул к столу веревками, стало получше но все равно не удобно блин. Пошел смотреть кокпиты, немного охренел от цен 30+ килорублей за эти железяки прост жаба душит, да еще может и не понравится и куда ее потом деть, это же не Айфон на авито ее так просто не продать, но без кокпита играть с таким оборудованием стало невозможно и вот так мне пришла в голову идея сделать версию кокпита из дерева, да да я знаю что дерево не подходящий материал и т.д. но мне в качестве развлекухи очень подходит да и цена неудачи не велика, деревяшки стоят копейки саморезы остались после ремонта а сиденье можно найти на авито за косарь. Что вышло https://drive.google.com/file/d/1ljEy7MVKfANxr5TfBV_CcUC6X90H5Ejz/view?usp=sharing https://drive.google.com/file/d/1HQSE3AuPG3U3m_aynaHdPdigN_5hUQu3/view?usp=sharing https://drive.google.com/file/d/1w8L2rzpkU7wrop274ziLVGmj4vxG4PoI/view?usp=sharing Самая простая конструкция, ожидаем вертикальная часть имеет люфтит, испытания показали что тараканить кокпит по комнате даже из дерева просто нереально поэтому во второй версии я добавил колесики. в целом очень сносно вышло сидеть удобно, ощущение от езды лучше, и самое главное по этим размерам можно строить конструкцию из алюминия что-бы не покупать лишнего. Размеры 1200 в длину 500 в ширину 650 высота стойки из бруска 40х40 и доски 150х10 все есть в ближайшем строймаркете, сиденье от ВАЗ 2114 Вопросы Вопрос к сообществу я видел чертежы где собирают из профиля RSI но как мне кажется их прочность очень избыточна ну типа камон 120х40 профилина для простой держалки руля это очень много, тут деревяшка справляется или для конструкции основания берут 40х80 ну это куда уже тут и бруска 40х40 хватает, короче я к чему, есть у кого опыт сборки такой конструкции на самом простом профиле 40x40 ? -
 Всем доброго времени суток! Уже достаточно давно я веду разработку программного обеспечения для контроллера игровых устройств, и поскольку я сам являюсь больше вирпилом, чем симрейсером, то блог разработки ведется на соответствующем форуме. Сегодня в честь релиза новой версии ПО я решил поделиться своей разработкой с вами, так как с появлением поддержки энкодеров высокого разрешения (пока что только одного) этот проект может стать интересным и виртуальным пилотам колесной техники) Думаю, многие из вас в курсе такого проекта, как OSH. Именно посмотрев на этот проект я решил создать FreeJoy, так как мне очень понравился дружелюбный интерфейс конфигуратора (поэтому интерфейс FreeJoy Configurator вам может показаться знакомым), но к сожалению у меня возникли проблемы с работой самого контроллера, и кроме этого он не имел многих функций, которые мне хотелось бы получить. Итак, на данный момент краткая сводка по функционалу FreeJoy: До 8 аналоговых осей До 128 кнопок и тумблеров До 4 хаток До 16 инкрементальных энкодеров (из них 1 с высоким разрешением) Функция преобразования положений осей в кнопки (до 12 кнопок на ось) Поддержка сдвиговых регистров 74HC165 и CD4021 для увеличения количества подключаемых кнопок; Поддержка цифровых датчиков Холла TLE5010/TLE5011, AS5600, MLX90393 (только интерфейс SPI); Поддержка внешних АЦП ADS1115 и MCP3201/02/04/08; 3 канала ШИМ для управления подсветкой; 24 светодиода (одиночные или в матрице), привязываемые к состояниям кнопок; Настройка имени устройства и других параметров USB; Удобная утилита для конфигурации; Обновление прошивки по USB; Сохранение и загрузка конфигурации устройства из файла. Кнопки и оси имеют весьма обширный выбор опций и настроек, более подробно со списком вы можете ознакомиться в wiki репозитории проекта. Ну а кому стало интересно - вот ссылки на скачивание актуальной версии прошивки для контроллера и установочник конфигуратора: Прошивка - https://github.com/FreeJoy-Team/FreeJoy/releases Конфигуратор - https://github.com/FreeJoy-Team/FreeJoyConfigurator/releases Ссылка на страницу проекта на github: https://github.com/FreeJoy-Team
Всем доброго времени суток! Уже достаточно давно я веду разработку программного обеспечения для контроллера игровых устройств, и поскольку я сам являюсь больше вирпилом, чем симрейсером, то блог разработки ведется на соответствующем форуме. Сегодня в честь релиза новой версии ПО я решил поделиться своей разработкой с вами, так как с появлением поддержки энкодеров высокого разрешения (пока что только одного) этот проект может стать интересным и виртуальным пилотам колесной техники) Думаю, многие из вас в курсе такого проекта, как OSH. Именно посмотрев на этот проект я решил создать FreeJoy, так как мне очень понравился дружелюбный интерфейс конфигуратора (поэтому интерфейс FreeJoy Configurator вам может показаться знакомым), но к сожалению у меня возникли проблемы с работой самого контроллера, и кроме этого он не имел многих функций, которые мне хотелось бы получить. Итак, на данный момент краткая сводка по функционалу FreeJoy: До 8 аналоговых осей До 128 кнопок и тумблеров До 4 хаток До 16 инкрементальных энкодеров (из них 1 с высоким разрешением) Функция преобразования положений осей в кнопки (до 12 кнопок на ось) Поддержка сдвиговых регистров 74HC165 и CD4021 для увеличения количества подключаемых кнопок; Поддержка цифровых датчиков Холла TLE5010/TLE5011, AS5600, MLX90393 (только интерфейс SPI); Поддержка внешних АЦП ADS1115 и MCP3201/02/04/08; 3 канала ШИМ для управления подсветкой; 24 светодиода (одиночные или в матрице), привязываемые к состояниям кнопок; Настройка имени устройства и других параметров USB; Удобная утилита для конфигурации; Обновление прошивки по USB; Сохранение и загрузка конфигурации устройства из файла. Кнопки и оси имеют весьма обширный выбор опций и настроек, более подробно со списком вы можете ознакомиться в wiki репозитории проекта. Ну а кому стало интересно - вот ссылки на скачивание актуальной версии прошивки для контроллера и установочник конфигуратора: Прошивка - https://github.com/FreeJoy-Team/FreeJoy/releases Конфигуратор - https://github.com/FreeJoy-Team/FreeJoyConfigurator/releases Ссылка на страницу проекта на github: https://github.com/FreeJoy-Team -
Закончил наконец ручной тормоз. Используется магниторезистор. Эту тему создал для обсуждения. Имеется настройка как начального угла так и конечного, а также изменение положения ручки. Макс градус отклонения примерно 45. Проект на грабкад
-
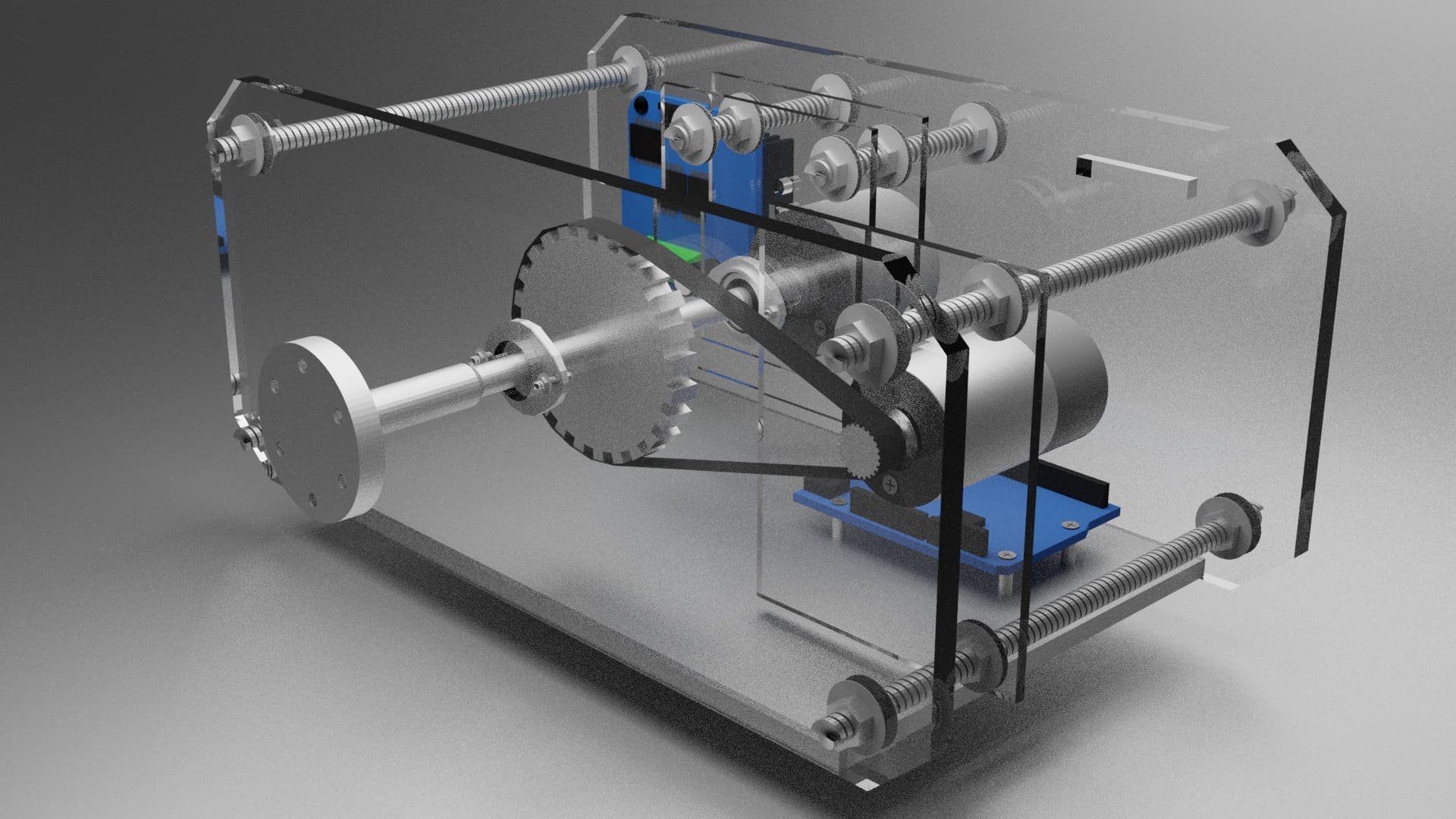
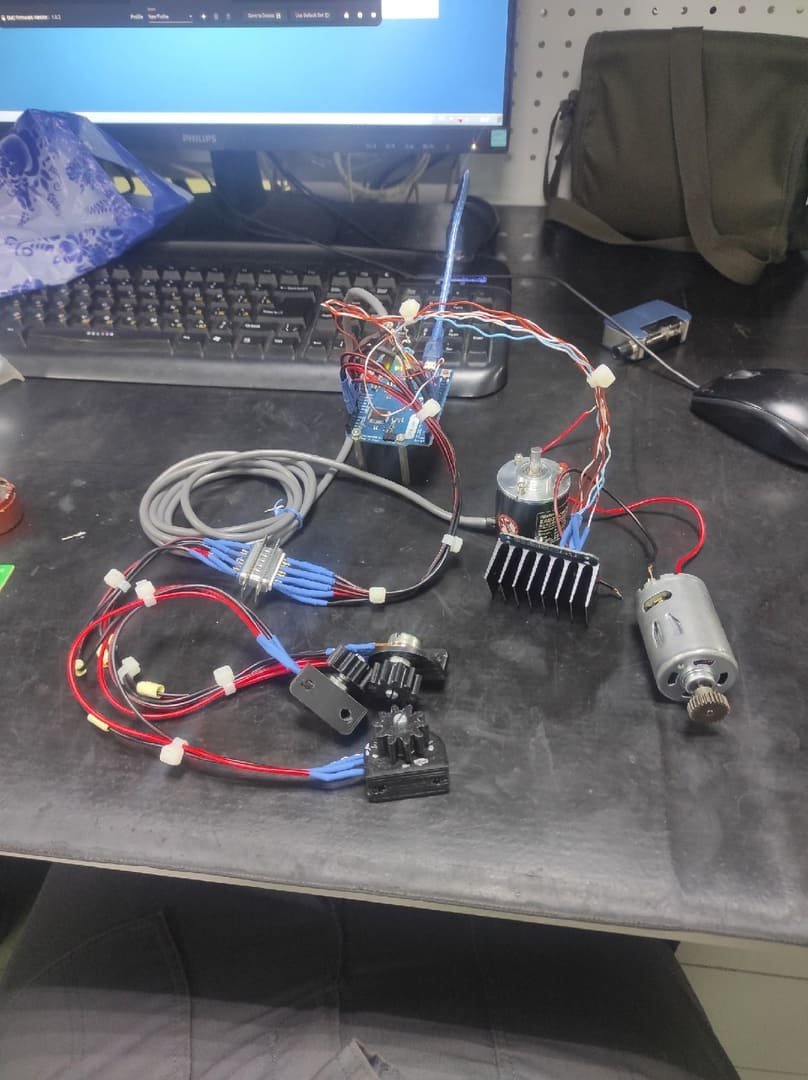
 Всем привет, больше года назад посетила меня мысль сконструировать свой руль с обратной отдачей, так как денег на хороший руль не было, а руки горели. По итогу конечно все это вышло в немаленькую сумму, за которую можно было купить подержанную базу именитых брендов, но сам интерес к самоделке только возрастал со временем. Изначально хотел собирать на базе Arduino leonardo, так как наткнулся на видео в ютубе от ebolzmagy, скачал его бесплатную обрезанную версию прошивки EMC для ардуино и заказал комплектующие со всеми вами известного китайского сайта. По приходу всех товаров сразу начал собирать электронную начинку и когда все заработало, списался с ним ( ebolzmagy), чтобы купить полную версию прошивки, но к тому времени он уже отказался от идеи собирать руль на базе ардуино, что и мне посоветовал. В ходе нашего общения выяснилось, что ардуино тупит из-за недостатка памяти в микропроцессоре и соответственно нужно искать другой вариант, этим вариантом была stm32f103c8t6, которая и была заказана на замену ардуино, но в последствии из-за моих кривых рук плата стала кирпичом и поэтому уже в третий раз пришлось заказывать новую плату, но почему-то наши китайские коллеги к тому моменту заломили на нее цену (stm32f103c8t6) и вообще было сложно найти именно эту плату, мой следующий выбор пал на плату, которая в итоге сейчас и стоит во главе всего механизма (stm32f407VET6). Ниже приложу 3д модель всей задумки изначально, но в дальнейшем она сильно изменилась. Изначальная конструкция менялась путем проб и ошибок, да и как сейчас я понимаю, главная проблема, которую я не решил, это то, что я установил двигатель и источник питания на 12в, но об этом чуть позже. Первая конструкция имела на борту двигатель RS775(12в, а до него еще был какой-то двигатель, не помню уже обозначение), энкодер Omron E6B2(Копия), зубчатые шкивы GT2 с ременной передачей 1:3(для такого движка понятно, что это соотношение не подходит, но хотелось быстрее испытать всю конструкцию в деле), драйвер BTS7960, источник питания 12В(15 ампер), Ардуино леонардо, корпус был сделан из оргстекла толщиной 10мм.(Был взят аквариум, рыбки уже давно играют в карты с Посейдоном, а аквариум пошел на "доброе" дело за ненадобностью) По итогу скажу так, когда этот суповой набор запустился, счастью не было придела, но все работало так, будто у меня в доме умирал тюлень, двигатель плакал и просил, чтобы его вернули обратно в шуруповерт, а источник питания хрюкал и плевался уходя в защиту от перегрузки при прохождении отметки стопора в прошивке, поэтому решено было что-то менять. Следующим этапом на замену ардуинки пришла stm32f103c8t6 и руль перестал тупить, но опять же из-за моих кривых рук, когда я проверял работоспособность сей конструкции, весело сгорел драйвер двигателя, да так, что батя хотел отказаться от сына (помню этот момент, когда матушка заходит в комнату, а я спиной стою к рулю и пытаюсь закрыть устроенный дома пожар и на вопрос, у тебя что-то горит? Делаю вопросительное лицо с идущим дымом из-за спины). В последствии был заказан новый драйвер, который стоит и по сей день. Также в процессе доработки моего Франкенштейна была угроблена плата stm32f103c8t6 и плачущий, но все еще находящийся в хорошем настроении (пришла зарплата), я понес китайским коллегам шекели в обмен на stm32f407VET6. Также были заказаны зубчатые шкивы с соотношение 1:6 и ремнем HTD3M, блок питания 12в (50ампер), двигатель RS895 12в (Моя главная ошибка, потому что мне кажется, что вместе с двигателем, они туда засунули смурфика с паяльником, иначе как объяснить, что эта падла греется так, что можно в холодную зиму за отопление не платить). Также были докуплены разные электронные компоненты, чтобы спаять и соорудить подобие приборной панели и обеспечить всему этому работу с помощью программы Simhub, а также были доработки с внешним видом и удобностью использования самой "конструкции", было сделано охлаждение на двигатель с использованием принудительного охлаждения (вентилятор сзади) и радитор с термопастой и хомутом для обвязки, но ощутимый эффект оказался лишь обманом(смурфик снова включет паяльник) и на нем можно сварить кофе любимой девушке. По итогу, граждане форумчане, прошу вашей помощи и сильно не судить человека начинающего свой путь в электронике. У меня к вам несколько вопросов: 1. Возможно ли переделать источник питания 12в на 24в и нужно ли это, может есть решение? 2. На какой двигатель лучше всю эту связку поставить?(Но так, как на 12в при этой той же силе фидбэка двигатель потребляет в 2 раза больше тока, я думаю, что скорее всего варианты с двигателем на 12в отпадут, хотя жду ваших предложений) 3. Купить логитек и идти играть в свой ETS2?( P.s. Никого не хотел оскорбить) Спасибо вам всем, кто дочитал до конца, прошу помощи и понимания)
Всем привет, больше года назад посетила меня мысль сконструировать свой руль с обратной отдачей, так как денег на хороший руль не было, а руки горели. По итогу конечно все это вышло в немаленькую сумму, за которую можно было купить подержанную базу именитых брендов, но сам интерес к самоделке только возрастал со временем. Изначально хотел собирать на базе Arduino leonardo, так как наткнулся на видео в ютубе от ebolzmagy, скачал его бесплатную обрезанную версию прошивки EMC для ардуино и заказал комплектующие со всеми вами известного китайского сайта. По приходу всех товаров сразу начал собирать электронную начинку и когда все заработало, списался с ним ( ebolzmagy), чтобы купить полную версию прошивки, но к тому времени он уже отказался от идеи собирать руль на базе ардуино, что и мне посоветовал. В ходе нашего общения выяснилось, что ардуино тупит из-за недостатка памяти в микропроцессоре и соответственно нужно искать другой вариант, этим вариантом была stm32f103c8t6, которая и была заказана на замену ардуино, но в последствии из-за моих кривых рук плата стала кирпичом и поэтому уже в третий раз пришлось заказывать новую плату, но почему-то наши китайские коллеги к тому моменту заломили на нее цену (stm32f103c8t6) и вообще было сложно найти именно эту плату, мой следующий выбор пал на плату, которая в итоге сейчас и стоит во главе всего механизма (stm32f407VET6). Ниже приложу 3д модель всей задумки изначально, но в дальнейшем она сильно изменилась. Изначальная конструкция менялась путем проб и ошибок, да и как сейчас я понимаю, главная проблема, которую я не решил, это то, что я установил двигатель и источник питания на 12в, но об этом чуть позже. Первая конструкция имела на борту двигатель RS775(12в, а до него еще был какой-то двигатель, не помню уже обозначение), энкодер Omron E6B2(Копия), зубчатые шкивы GT2 с ременной передачей 1:3(для такого движка понятно, что это соотношение не подходит, но хотелось быстрее испытать всю конструкцию в деле), драйвер BTS7960, источник питания 12В(15 ампер), Ардуино леонардо, корпус был сделан из оргстекла толщиной 10мм.(Был взят аквариум, рыбки уже давно играют в карты с Посейдоном, а аквариум пошел на "доброе" дело за ненадобностью) По итогу скажу так, когда этот суповой набор запустился, счастью не было придела, но все работало так, будто у меня в доме умирал тюлень, двигатель плакал и просил, чтобы его вернули обратно в шуруповерт, а источник питания хрюкал и плевался уходя в защиту от перегрузки при прохождении отметки стопора в прошивке, поэтому решено было что-то менять. Следующим этапом на замену ардуинки пришла stm32f103c8t6 и руль перестал тупить, но опять же из-за моих кривых рук, когда я проверял работоспособность сей конструкции, весело сгорел драйвер двигателя, да так, что батя хотел отказаться от сына (помню этот момент, когда матушка заходит в комнату, а я спиной стою к рулю и пытаюсь закрыть устроенный дома пожар и на вопрос, у тебя что-то горит? Делаю вопросительное лицо с идущим дымом из-за спины). В последствии был заказан новый драйвер, который стоит и по сей день. Также в процессе доработки моего Франкенштейна была угроблена плата stm32f103c8t6 и плачущий, но все еще находящийся в хорошем настроении (пришла зарплата), я понес китайским коллегам шекели в обмен на stm32f407VET6. Также были заказаны зубчатые шкивы с соотношение 1:6 и ремнем HTD3M, блок питания 12в (50ампер), двигатель RS895 12в (Моя главная ошибка, потому что мне кажется, что вместе с двигателем, они туда засунули смурфика с паяльником, иначе как объяснить, что эта падла греется так, что можно в холодную зиму за отопление не платить). Также были докуплены разные электронные компоненты, чтобы спаять и соорудить подобие приборной панели и обеспечить всему этому работу с помощью программы Simhub, а также были доработки с внешним видом и удобностью использования самой "конструкции", было сделано охлаждение на двигатель с использованием принудительного охлаждения (вентилятор сзади) и радитор с термопастой и хомутом для обвязки, но ощутимый эффект оказался лишь обманом(смурфик снова включет паяльник) и на нем можно сварить кофе любимой девушке. По итогу, граждане форумчане, прошу вашей помощи и сильно не судить человека начинающего свой путь в электронике. У меня к вам несколько вопросов: 1. Возможно ли переделать источник питания 12в на 24в и нужно ли это, может есть решение? 2. На какой двигатель лучше всю эту связку поставить?(Но так, как на 12в при этой той же силе фидбэка двигатель потребляет в 2 раза больше тока, я думаю, что скорее всего варианты с двигателем на 12в отпадут, хотя жду ваших предложений) 3. Купить логитек и идти играть в свой ETS2?( P.s. Никого не хотел оскорбить) Спасибо вам всем, кто дочитал до конца, прошу помощи и понимания)
-
Ребят, всем привет, если есть люди, которые уже собрали готовые рули на stm32 и прошивке от EMC от EbolzMagy, посоветуйте пожалуйста настройки к данной прошивке, разные варианты пробую, но может кто-то уже нашел "золотую середину" в обратной отдаче, заранее вам благодарен.
-
 Всем доброго времени суток дорогие друзья. Это мой первый пост на форумах, так что не судите строго если есть какие то ошибки сразу извиняюсь, мог не заметить. Давайте начнем. Кому интересна моя предыстория то она будет под спойлером: (кому не охота все читать у меня на канале есть видео где я это все рассказываю, можете посмотреть послушать и поддержать в моих начинаниях ссылка на видео Fanatec Porsche 911 GT3 RS). Первым делом я купил промышленный экодер: (его пришлось разобрать что бы он встал в руль) С этим энкодером уже все заработало. Потом купил драйвер двигателя BTS7960 Ну и начал потихоньку приступать к монтажу этого всего в руль. Изначально все было вот так. этот руль уже ремонтировали из видимого это меняли провода от главной платы в плату руля, их я потом и буду использовать Сняв все платы я закрепил энкодер вот так, немного не красиво но работает. Провода закрепил так что при повороте руля в обе стороны они легко наматываются на вал энкодера и не рвутся. шестеренка на валу руля осталась от прошлых экспериментов с энкодером от принтера (этот колхоз можете посмотреть в моем видео). Вал энкодера сидит плотно и не проворачивается по крайней мере за месяц использования я такого не заметил. Т.к. этот руль уже кто то делал и внутри пластикового вала была алюминиевая трубка его кто то уже усиливал до меня и мне пришлось провода протягивать через термоусадку, выглядит это все вот так: Поставил на место штатное охлаждение двигателя: И нашел место и установил драйвер двигателя, т.к. мой двигатель не потребляет больше чем 24В/3А то радиатор я снял он тут не нужен, тем более все мы знаем что он там стоит практически для красоты и никакой термопасты и хорошего отвода тепла нет. Ну и плюс ко всему то над ним стоит штатный кулер который вытягивает весь горячий воздух наружу. Кстати плата STM32 встала как родная на место штатной платы. Теперь все подключаем, ставим ЮСБ хаб (который потом я убрал т.к. из за него лагало все) и можно собирать и тестить. P.S. Подключать педали нужно к 3v, мне из за этого пришлось покупать новую плату STM32 т.к. я походу подпалил немного АЦП на ней. А подключил я так по тому что до этого работал с ардуино и там все конектится к 5v. Кнопки на самом руле а так же вибромоторы 2шт. 7-ми сегментный дисплей а также добавил адресную LED ленту WS2812B для индикации оборотов двигателя, уже это все работает и недели 2 тестирую, сделал на ардуино про микро, если вам будет интересно чуть позже расскажу как все это делал. Если что то не понятно спрашивайте я мог что то упустить потому что много рассказывать. Если нужно видео с тестами могу сделать и выложить.
Всем доброго времени суток дорогие друзья. Это мой первый пост на форумах, так что не судите строго если есть какие то ошибки сразу извиняюсь, мог не заметить. Давайте начнем. Кому интересна моя предыстория то она будет под спойлером: (кому не охота все читать у меня на канале есть видео где я это все рассказываю, можете посмотреть послушать и поддержать в моих начинаниях ссылка на видео Fanatec Porsche 911 GT3 RS). Первым делом я купил промышленный экодер: (его пришлось разобрать что бы он встал в руль) С этим энкодером уже все заработало. Потом купил драйвер двигателя BTS7960 Ну и начал потихоньку приступать к монтажу этого всего в руль. Изначально все было вот так. этот руль уже ремонтировали из видимого это меняли провода от главной платы в плату руля, их я потом и буду использовать Сняв все платы я закрепил энкодер вот так, немного не красиво но работает. Провода закрепил так что при повороте руля в обе стороны они легко наматываются на вал энкодера и не рвутся. шестеренка на валу руля осталась от прошлых экспериментов с энкодером от принтера (этот колхоз можете посмотреть в моем видео). Вал энкодера сидит плотно и не проворачивается по крайней мере за месяц использования я такого не заметил. Т.к. этот руль уже кто то делал и внутри пластикового вала была алюминиевая трубка его кто то уже усиливал до меня и мне пришлось провода протягивать через термоусадку, выглядит это все вот так: Поставил на место штатное охлаждение двигателя: И нашел место и установил драйвер двигателя, т.к. мой двигатель не потребляет больше чем 24В/3А то радиатор я снял он тут не нужен, тем более все мы знаем что он там стоит практически для красоты и никакой термопасты и хорошего отвода тепла нет. Ну и плюс ко всему то над ним стоит штатный кулер который вытягивает весь горячий воздух наружу. Кстати плата STM32 встала как родная на место штатной платы. Теперь все подключаем, ставим ЮСБ хаб (который потом я убрал т.к. из за него лагало все) и можно собирать и тестить. P.S. Подключать педали нужно к 3v, мне из за этого пришлось покупать новую плату STM32 т.к. я походу подпалил немного АЦП на ней. А подключил я так по тому что до этого работал с ардуино и там все конектится к 5v. Кнопки на самом руле а так же вибромоторы 2шт. 7-ми сегментный дисплей а также добавил адресную LED ленту WS2812B для индикации оборотов двигателя, уже это все работает и недели 2 тестирую, сделал на ардуино про микро, если вам будет интересно чуть позже расскажу как все это делал. Если что то не понятно спрашивайте я мог что то упустить потому что много рассказывать. Если нужно видео с тестами могу сделать и выложить.
-
 Всем доброго времени суток! Хочу показать вам реплику штурвала Ferrari 488 GT3 моей разработки. Увлёкся симрейсингом ещё 4 года назад, но идея сделать свой руль возникла в декабре 2019ого, когда был куплен Thrustmaster Т300. Собственно, с тех пор и велась разработка, закончившаяся буквально в начале 2021ого. Итак, поехали: Ширина штурвала 307мм. Имеются 2 магнитных подрулевых переключателя скоростей, 2 тумблера трекшн-контроля (точно такие же, как в реальной 488 GT3), 2 роторных энкодера EC11 (именно энкодеры, а не позиционные переключатели), 13 кнопок (включая 2 на роторных энкодерах) и дополнительно крестовина из 4 кнопок для навигации по меню, настройки питов и т.п. В общей сложности 27 действий. Лицевая плита выполнена из отфрезерованного на ЧПУ-станке карбона толщиной 5мм. Рукоятки сделаны из резиноподобного полиуретана (твёрдость 70А по Шору) методом литья в силиконовые формы. Текстура поверхности - "мелкий песок". Ширина рукоятки в самом толстом месте примерно 37мм, что чуть больше, чем на стандартном руле T300 Ferrari Alcantara Edition. Держать удобно как в перчатках, так и без них Переключатели передач магнитные (магниты 15х5мм). Отфрезерованы из алюминия Д16Т и анодированы в чёрный цвет. Лепестки по форме повторяют оригинальные от Ferrari 488 GT3, сделаны из 3мм карбона. Щелчок тактильно очень приятный) Задняя крышка отлита из качественного ударопрочного полиуретана твёрдостью 80D по Шору. Для усиления конструкции внутри сделаны рёбра жёсткости. Для сомневающихся, что этот материал может выдерживать дд-базы, скажу, что штурвал уже используют люди, пользующиеся симукубом и подиумом фанатека, и жалоб на жёсткость нет никаких. Думаю, в связке с 5мм карбоном их и не должно быть. Текстура поверхности крышки - всё тот же приятный на ощупь "мелкий песок". Для соединения с лицевой плитой во внутренней части крышки имеются вставные элементы в виде латунных втулок, поэтому на наружной части нет никаких лишний винтов и тому подобного. Ручки роторных энкодеров также отлиты из полиуретана, внутри есть втулка и винт для того, чтобы подпереть вал энкодера. Единственные пластиковые детали, выполненные не литьём - это чёрные окантовки вокруг кнопок. Отливать такие маленькие детали выходит неоправданно дорого, поэтому они печатаются на фотополимерном принтере, вручную шкурятся и красятся. Выглядят хорошо По центру руля силиконовый логотип. Можно выбрать, как логотип Ferrari, так и логотип моей мастерской Orion simracing Вокруг кнопок имеются наклейки. Без внешнего воздействия не отклеиваются В качестве управляющей платы используется Arduino Pro Micro, её возможностей более, чем достаточно. Для обвязки с ней всех переключателей и кнопок используется печатная плата собственной разработки. Через разъём gx12 и витой usb-кабель (эластичный, может растягиваться до 2,5 метров) руль подключается к компьютеру и определяется, как игровое устройство. Никаких драйверов и настройки не требуется. Комплектация: сам штурвал. Витой usb-кабель с ферритовым фильтром (на всякий случай). На выбор переходник для баз Thrustmaster (литьё полиуретана), либо 6х70мм адаптер из анодированного алюминия для любых баз, поддерживающих 6х70мм. 2 силиконовых наклейки на центр руля (Ferrari и Orion simracing). Запасной комплект наклеек вокруг кнопок. Собственно, готов изготавливать для всех желающих Цена 38000 рублей. Доставка Почтой России или любой удобной ТК до офиса, входит в стоимость. Мои контакты: https://www.instagram.com/el_aero/ (много фото и видео) https://vk.com/elaero https://www.youtube.com/c/ElmarKurbanov Прикладываю ссылки с подробными фото и видео (прошу прощения за не очень высокое качество, снимал на телефон). Буду рад ответить на вопросы.
Всем доброго времени суток! Хочу показать вам реплику штурвала Ferrari 488 GT3 моей разработки. Увлёкся симрейсингом ещё 4 года назад, но идея сделать свой руль возникла в декабре 2019ого, когда был куплен Thrustmaster Т300. Собственно, с тех пор и велась разработка, закончившаяся буквально в начале 2021ого. Итак, поехали: Ширина штурвала 307мм. Имеются 2 магнитных подрулевых переключателя скоростей, 2 тумблера трекшн-контроля (точно такие же, как в реальной 488 GT3), 2 роторных энкодера EC11 (именно энкодеры, а не позиционные переключатели), 13 кнопок (включая 2 на роторных энкодерах) и дополнительно крестовина из 4 кнопок для навигации по меню, настройки питов и т.п. В общей сложности 27 действий. Лицевая плита выполнена из отфрезерованного на ЧПУ-станке карбона толщиной 5мм. Рукоятки сделаны из резиноподобного полиуретана (твёрдость 70А по Шору) методом литья в силиконовые формы. Текстура поверхности - "мелкий песок". Ширина рукоятки в самом толстом месте примерно 37мм, что чуть больше, чем на стандартном руле T300 Ferrari Alcantara Edition. Держать удобно как в перчатках, так и без них Переключатели передач магнитные (магниты 15х5мм). Отфрезерованы из алюминия Д16Т и анодированы в чёрный цвет. Лепестки по форме повторяют оригинальные от Ferrari 488 GT3, сделаны из 3мм карбона. Щелчок тактильно очень приятный) Задняя крышка отлита из качественного ударопрочного полиуретана твёрдостью 80D по Шору. Для усиления конструкции внутри сделаны рёбра жёсткости. Для сомневающихся, что этот материал может выдерживать дд-базы, скажу, что штурвал уже используют люди, пользующиеся симукубом и подиумом фанатека, и жалоб на жёсткость нет никаких. Думаю, в связке с 5мм карбоном их и не должно быть. Текстура поверхности крышки - всё тот же приятный на ощупь "мелкий песок". Для соединения с лицевой плитой во внутренней части крышки имеются вставные элементы в виде латунных втулок, поэтому на наружной части нет никаких лишний винтов и тому подобного. Ручки роторных энкодеров также отлиты из полиуретана, внутри есть втулка и винт для того, чтобы подпереть вал энкодера. Единственные пластиковые детали, выполненные не литьём - это чёрные окантовки вокруг кнопок. Отливать такие маленькие детали выходит неоправданно дорого, поэтому они печатаются на фотополимерном принтере, вручную шкурятся и красятся. Выглядят хорошо По центру руля силиконовый логотип. Можно выбрать, как логотип Ferrari, так и логотип моей мастерской Orion simracing Вокруг кнопок имеются наклейки. Без внешнего воздействия не отклеиваются В качестве управляющей платы используется Arduino Pro Micro, её возможностей более, чем достаточно. Для обвязки с ней всех переключателей и кнопок используется печатная плата собственной разработки. Через разъём gx12 и витой usb-кабель (эластичный, может растягиваться до 2,5 метров) руль подключается к компьютеру и определяется, как игровое устройство. Никаких драйверов и настройки не требуется. Комплектация: сам штурвал. Витой usb-кабель с ферритовым фильтром (на всякий случай). На выбор переходник для баз Thrustmaster (литьё полиуретана), либо 6х70мм адаптер из анодированного алюминия для любых баз, поддерживающих 6х70мм. 2 силиконовых наклейки на центр руля (Ferrari и Orion simracing). Запасной комплект наклеек вокруг кнопок. Собственно, готов изготавливать для всех желающих Цена 38000 рублей. Доставка Почтой России или любой удобной ТК до офиса, входит в стоимость. Мои контакты: https://www.instagram.com/el_aero/ (много фото и видео) https://vk.com/elaero https://www.youtube.com/c/ElmarKurbanov Прикладываю ссылки с подробными фото и видео (прошу прощения за не очень высокое качество, снимал на телефон). Буду рад ответить на вопросы.- 18 ответов
-
- 10
-
-
Мои "Юниорские" педали
Caravangoes опубликовал тема в Всё для симрейсинга - Рули, сиденья, железо для ПК
Привет! Наконец, я почти завершил работу над своей очередной поделкой, и спешу поделиться с вами результатом своих трудов! Собственно – мои «юниорские» педали! Вдохновлялся в основном, конечно же, продуктами Heusinkveld Engineering. Кое-какие спорные для меня моменты я обошел и решил по-своему, а вот удачные решения наоборот позаимствовал. На данный момент педали находятся всё ещё в стадии прототипа, поэтому на тормозе используется load cell на 70кг, а на педалях газа и сцепления установлены потенциометры BOURNS. На данный момент я не заметил ни одной причины устанавливать вместо них что-то более дорогое и сложное, кроме одной – сравнительно малое количество циклов работы у потенциометров. Поэтому я уже заказал роторный датчик холла для педали газа. Возможно, кроме долговечности работы датчика я почувствую какую-то разницу в разрешающей способности. Посмотрим. А вот для педали сцепления, на мой взгляд, нет необходимости использовать что-то дороже и сложнее, чем хороший потенциометр. Поэтому, скорее всего, он у меня там будет стоять до тех пор, пока не выйдет из строя, что теоретически должно произойти уже совсем скоро – через 10 000 циклов. Подставка изготовлена из листового металла, с полимерным покрытием. Материал самих педалей – мой любимый листовой АМГ толщиной 3мм. Втулки скольжения и прочие пластиковые части в местах трения - фторопласт-4. Для всех педалей были специально изготовлены пружины с подходящими характеристиками. С помощью регулировок угла штока педали и преднатяга пружины усилие на педали газа и сцепления можно регулировать в очень широком диапазоне. Что же о педали тормоза: можно регулировать преднатяг пружины, который характеризует сопротивление свободного хода, а так же можно регулировать сопротивление рабочего хода посредством разного количества и размеров эластичных элементов. Пока что для наглядности я использую довольно «длинные» упругие элементы, от чего тормоз достаточно мягкий. О упругих элементах: это не полиуретан. Путём экспериментов я выяснил, что его должно быть достаточно много для того, чтобы он заметно демпфировал. Но поскольку я преследовал цель сделать конструкцию компактной и эстетичной, и при этом не потерять функционал – мне пришлось долго и упорно искать замену громоздкому полиуретановому набору. И я его нашёл! Основной рабочий элемент - это обыкновенная толстостенная вакуумная трубка 18х8 (ТУ 38105881-85). Знаю, на фоне дорогостоящих эластомерных пружин моя находка выглядит достаточно стрёмно, но в моей конструкции она работает просто великолепно! Я просто нарезал элементов длиной по 5, 10 и 15мм. и комбинирую их так, как мне удобно! При этом, три коротких элемента (по 5мм.) разделённые друг от друга шайбой, дают очень жёсткий рабочий ход, а длинный (15мм.) даёт возможность продавить тормоз гораздо глубже. При этом, вопреки всем моим сомнениям, такие эластичные элементы получились очень долговечными. По крайней мере на протяжение более, чем полгода они никак не потеряли своих свойств. Посмотрим, что будет дальше!) Дополнительный, мягкий эластичный элемент – это достаточно распространённая силиконовая микропористая резина. Подобный элемент используется в load cell педали тормоза Fanatec CSL ELITE. Рад буду услышать мнение сообщества, тем более, что это всё ещё не финальный вариант и у меня будет возможность исправить или добавить то, до чего я сам не додумался! Приятного просмотра! -
 Доброго времени суток, форумчане. Продолжая свое немного бомже-приключение по просторам сим-рейсинг комьюнити и не желая отдавать 60 долларов за игрушечный g-shifter, я решил совместить, что называется, приятное с полезным и собрать свой. На бумаге все просто и описано в видосе от amstudio. Была найдена 7-ми ступенчатая плита для данного девайса(не помню уже даже где, искал с месяц назад), в местных магазинах за гроши были найдены все необходимые металлические детали, usb плата была найдена у китайцев за 7 баксов с проводами, включая доставку. Доступ к 3Д принтеру есть, осталось только собрать? А вот тут хочу уточнить пару вещей. 1) Из чего печатать? Из доступного PLA, PETG и NYLON, но NYLON дорогой, а я скупой. У этих материалов предел прочности в принципе одинаковый, в районе 7000+ psi, разница в поведении под нагрузкой. PETG довольно гибкий, что позволяет ему выдерживать большие продолжительные нагрузки, но не повлияет ли это отрицательно на конструкцию в целом? То есть не придется ли мне стабильно раз в пару месяцев перепечатывать плиту передач из-за того что она тупо деформируется? 2) Возможно ли адаптировать данный агрегат под использование с Logitech G920? Найти распиновку коннектора DB9 на лоджитеках легко, но лоджитеки используют потенциометры в своем шифтере, а не кнопки как в этой DIY задумке, что накладывает сложности. Это на самом деле не критично практически во всех играх, так как для консолей я использую GIMX, а на ПК большинство игр поддерживают несколько устройств. Единственное где данная фича была бы реально полезна - FH4/FM7, так как там нет такой поддержки насколько я знаю. 3) Есть ли в этом реальный смысл или лучше взять лоджитековский шифтер (есть бу за 40 бачей) и заменить в нем пружину на потуже? Руки просто больно уж чешутся свое сделать, но если оно окажется хуже чем шифтер лоджитеков, это будет фиаско) В остальном я готов самоделить, заранее спасибо за советы.
Доброго времени суток, форумчане. Продолжая свое немного бомже-приключение по просторам сим-рейсинг комьюнити и не желая отдавать 60 долларов за игрушечный g-shifter, я решил совместить, что называется, приятное с полезным и собрать свой. На бумаге все просто и описано в видосе от amstudio. Была найдена 7-ми ступенчатая плита для данного девайса(не помню уже даже где, искал с месяц назад), в местных магазинах за гроши были найдены все необходимые металлические детали, usb плата была найдена у китайцев за 7 баксов с проводами, включая доставку. Доступ к 3Д принтеру есть, осталось только собрать? А вот тут хочу уточнить пару вещей. 1) Из чего печатать? Из доступного PLA, PETG и NYLON, но NYLON дорогой, а я скупой. У этих материалов предел прочности в принципе одинаковый, в районе 7000+ psi, разница в поведении под нагрузкой. PETG довольно гибкий, что позволяет ему выдерживать большие продолжительные нагрузки, но не повлияет ли это отрицательно на конструкцию в целом? То есть не придется ли мне стабильно раз в пару месяцев перепечатывать плиту передач из-за того что она тупо деформируется? 2) Возможно ли адаптировать данный агрегат под использование с Logitech G920? Найти распиновку коннектора DB9 на лоджитеках легко, но лоджитеки используют потенциометры в своем шифтере, а не кнопки как в этой DIY задумке, что накладывает сложности. Это на самом деле не критично практически во всех играх, так как для консолей я использую GIMX, а на ПК большинство игр поддерживают несколько устройств. Единственное где данная фича была бы реально полезна - FH4/FM7, так как там нет такой поддержки насколько я знаю. 3) Есть ли в этом реальный смысл или лучше взять лоджитековский шифтер (есть бу за 40 бачей) и заменить в нем пружину на потуже? Руки просто больно уж чешутся свое сделать, но если оно окажется хуже чем шифтер лоджитеков, это будет фиаско) В остальном я готов самоделить, заранее спасибо за советы. -

Копеечный индикатор передач
jogger опубликовал тема в Всё для симрейсинга - Рули, сиденья, железо для ПК
Всем привет! Решил поделиться самоделкой, которую выполнил по простой инструкции от небезыизвестного amstudio. Собственно, индикатор передачи на матричном дисплее - опытный, так сказать, образец. Устройство простое, как три копейки - дисплей, ардуинка, корпус, кабель. Пересказывать видео не буду, каждый желающий сможет его найти и посмотреть :) Хотелось бы сказать, что для сборки такого простого гаджета не нужно обладать какими-то особыми умениями. В моем случае, припаяны 5 контактов на ардуинку, но ведь можно купить уже распаянную, и тогда проблем вообще не будет. Управляется эта штука через софт SimHub - оттуда же и заливается прошивка для контроллера. В "бою", как по мне, вещь полезная - боковым зрением всегда видно, какая передача - светит ярко. Но опять же, это мое скромное мнение. В качестве корпуса использовал коробочку от губки для обуви, обтянутую пленкой Вот немного инфы по комплектующим: 1. Матричный дисплей 8x8 - 135р 2. Ардуино про микро - 200р 3. Кабель - 78р 4. Губка - 18р Итого - примерно 450р, месяц ожидания, час времени (в основном на подготовку корпуса). Это моя первая поделка, и эмоции, которые я испытал, когда "оно заработало", просто не передать словами :) На выбор есть несколько видов отображения, все легко настраивается через ПО. В планах - жду, пока приедет светодиодная лента, чтобы совместить это дело с индикацией оборотов в достойном корпусе. P.S. Приятно быть причастным к такому сообществу! Кажется, у меня новое хобби- 19 ответов
-
- 12
-
-
 Представляю вашему вниманию, свою очередную поделку.? Контроллер на кнопки - STM bluepill на Freejoy + Ardiuno и SimHUB на индикацию.
Представляю вашему вниманию, свою очередную поделку.? Контроллер на кнопки - STM bluepill на Freejoy + Ardiuno и SimHUB на индикацию.
-
Решил собрать DD. Вот мой конфиг на данный момент: 1.Мотор 1пи12.09 2. Плата МК STM32 3.Два драйвера BTS 7960 4.Энкодер omron e6b2cwz6c У меня возникло несколько вопросов: 1. Какой мотор можно взять вместо 1пи12 ? 2. Какой блок питания взять? 3. Мотор 1пи12.09 есть возможность купить без проводов. Какие провода использовать при подключении ?
-
Добрый день. Продаю полный комплект кокпита для симрейсинга. Общий «пробег» данного сетапа 622 часа, судя по steam. Использовался для: - Asseto corsa – 132ч. - Project Cars 2 – 53ч. - RaceRoom Racing – 81ч. - ETS 2 / ATS 2 – 356ч. Кокпит собран на алюминиевом профиле – изготовитель «Соберизавод» – по собственному проекту, распиловку прикладываю. Регулировки позволяют настроить кокпит абсолютно под любого водителя. Конфигурацию Вы сможете пересобрать, т к это большой конструктор. 1. Кокпит алюминиевый профиль (изготовитель «Соберизавод») + сиденье Nissan Almera (продольная регулировка на штатных полозьях, регулировка наклона спинки) – 25 000р. 2. Руль и педали Thrustmaster T300 Ferrari Integral Rw Alcantara – 39 000р. 3. Коробка передач Thrustmaster TH8A Shifter Add-On – 13 000р. 4. Ручка КПП VTSK SCANIA (изготовитель «Проект Камаз») – 3 500р. 5. Полные набор аксессуаров Dim Sim: a. Секвентальный шифтер+струбцина – 3 000р. b. Ручной тормоз ST+струбцина – 3 000р. c. Баттон бокс – 4 000р. d. Комплект лепестков под рули с выносом (не использовался) – 1 000р. e. Адаптер-переходник для рулей большего диаметра и иной конфигурации для thrustmaster t300 – 1 000р. 6. Сменные рули диаметром 35 см – в подарок Техническое состояние всех аксессуаров – отличное. На рулях конечно же есть следы эксплуатации (алькантара все-таки), катал всегда в перчатках. Сама база руля и педали работают штатно, без замечаний. Сборка октябрь 2018 года. Причина продажи – стоит без использования, времени на симрейсинг найти не удается. Если заберете все сразу, то цена 85 000р. Строго самовывоз из МО, г. Одинцово, ул. Белорусская – помогу спустить, загрузить к Вам в авто)
-
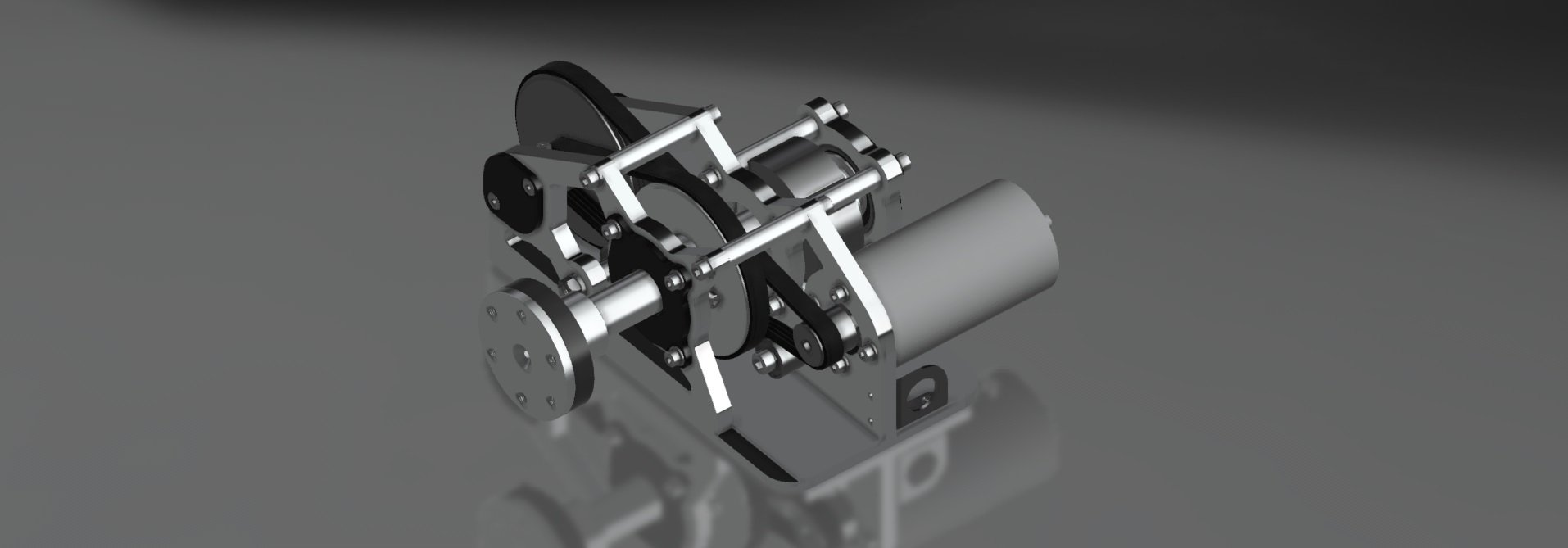
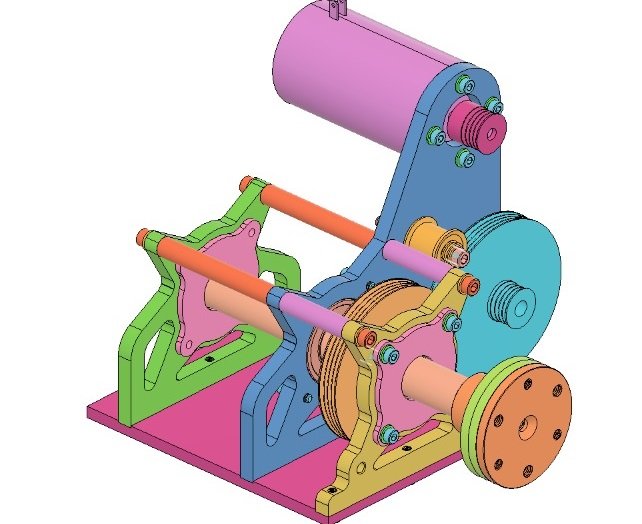
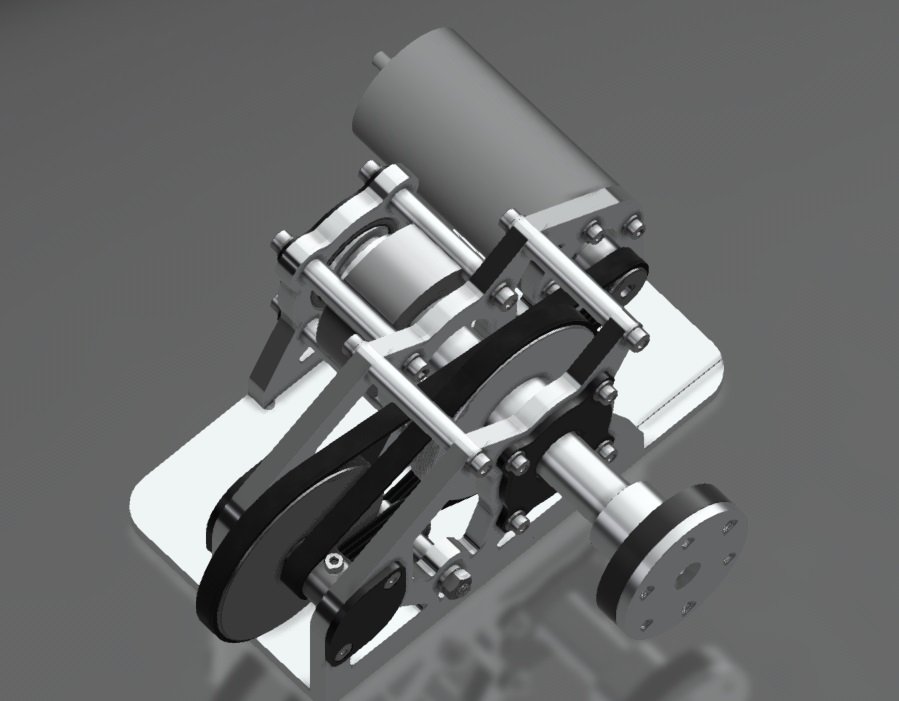
 Доброго дня! Лучшего названия для темы не придумал)) Внимательно следил за проектом рулевой базы от Caravangoes. Жутко впечатлен до сих пор! Безумно серьезная работа с такой эстетикой, что просто вне конкуренции (лично для меня). И до недавнего времени я даже мысли не допускал пытаться сделать что-либо даже супер отдалённо похожее, ибо кажется всё это сложным и недостижимым. Но попался в руки рассыпающийся Т500RS и из желания его перебрать плавно перенесся к проекту, который на данный момент готов примерно на половину. Итак. Разобрав Т500RS я был поражен инженерным идиотизмом. Обнаружил множество сколов пластика, раздолбанный ограничитель поворотов, вал со сколом из какого-то не самого приятного сплава и зубчатые ремни передачи. Для тех, кто не знает-Т500RS внутри весьма объёмного пластикового "обтекателя" представляет собой не слишком большую черную пластиковую коробочку с двумя металлическими пластинами (одна - основание с креплением струбцины, вторая - усиление лицевой части). Внутри находится собственно привод, двигатель, вал и прочие подробности. Сперва хотел просто переделать корпус для этой "коробочки" в стиле модов GREY WOLF, но по итогу решился на более радикальные изменения. В первую очередь, очень хотелось заменить зубчатые ремни на поликлиновые. Во-первых, они точно тише. Во-вторых, есть ощущение зубчастости (я в тех. части не силен, оперирую в основном домыслами и предположениями) и мне вот кажется, что это именно из-за зубчатых ремней, что как минимум логично звучит. В Фанатеке клабспорт стоят клиновые, 4pj, кажется, так что подумал, что взяв такие-же не прогадаю. Хотя задавался вопросом-почему сам Caravangoes использовал зубчатый. Возможно-мощности передаются выше и это необходимо, дабы избежать проскальзываний.. Так же хотелось максимальной монолитности конструкции. Что бы не было никаких люфтов, скрипов и прочего. От сюда следует использование металла в конструкции. Ну и в последнюю очередь подумал об эргономике. Никогда не разбирался ни в устройстве микросхем, ни в платах, ни в пайке и прочем-поэтому подумал, что всю эту конетель было бы удобно засунуть нахрен в отдельную "коробочку" и как нибудь потом разобраться. Со временем решил, что не плохая мысль построить всю логику будущих устройств следующим образом: -главным модулем идёт баттон бокс внутри располагаю все платы, блок питания. От него к двигателю и энкодеру будет идти своя "коса", так же разъем для провода питания и usb. Если теоретически делать проект не на базе Т500 а с нуля, можно будет создать большее количество разъемов под любую периферию. И кнопки будут не лишними, баттон бокс же вещь хорошая) А рулевую базу можно не перегружать проводами, платами и разъемами. -присоединяемым к нему идет модуль рулевой базы двигатель и энкодер соеденяются с разъмом на 9пин. Всё это через провод подключается к баттон боксу. Больше ни-ка-ких компонентов электронных на базе нет. по разъему конечно я допускаю собственный идиотизм, так как провода очень разной площади сечения. По хорошему это всё должно быть соединено иначе, но я решил рискнуть сделать так, всё равно для себя это делаю ну и проект можно сказать черновой) Приступил к созданию модели будущей базы. Мой уровень владения 3д редакторами-google скетч ап на твердую троечку. И тут я хочу просто 10005000 раз снять шляпу перед господином @Caravangoes . Помимо вдохновения, человек подарил ещё и свои наработки в открытом виде. Я не стал пренебрегать. Не долго думая, скачал 3д модель в формате под скетчап, удалил все не нужные мне узлы, затем наделал скриншотов с разных ракурсов и прямо в пейнте подрисовал всё то, что мне примерно нужно было создать по итогу. Отправившись к знакомому со всем этим делом через неделю получил переработанную версию. После определённых правок получил таки результат, которым более чем доволен. Было сохранено родное передаточное число 1\16 Был сохранен ограничитель поворотов (выполнили по аналогии с фанатековским, используя распорки в качестве направляющих). Оставили без изменений посадочное место под рулевое колесо (в планах сделать свой квик релиз), ну и очевидно, что конструкция именно ИЗМЕНЕНА, не создана с нуля. За такую возможность ещё раз сердечно благодарю @Caravangoes Для охлаждения будет использоваться родной радиатор (новый купить не удалось, специфический размер, а делать с нуля не особо захотелось), так же кажется, что теплоотводом будет служить и сам корпус руля, так как весьма большая площадь контакта у двигателя и центральной плиты. Из чего в итоге состоит база: Ремни 4PJ (356 и 483) 2 подшипника 16004 2 подшипника 628 4 подшипника 606 2RS или ZZ - без разницы, насколько я понял, так что какие нашел в своем городе, такие и купил :) а так же м5х20 - 15 шт. + шайбы м4х14 - 15 шт. + шайбы м6х40 - 2 шт. (с шайбами и гайками) - для натяжителей м4х12 - 15 шт. (потайные) - для крепления плит между собой м3х6 - 4 шт. (круглые) - для кронштейна разъема Указал всё с запасом) Так же нужен синий фиксатор резьбы. А может и красный.. Для токарных работ: (из Д16 или ближайших по свойствам сплавов-аналогов) Вал промежуточного шкива Вал рулевого колеса Шкив ведомый Шкив ведущий Шкив промежуточный распорка 1 (2шт) распорка 2 (4шт) Фланец крепления руля Шайба на фланец руля втулка натяжителя 1 втулка натяжителя 2 Для фрезерных работ: (АБС пластик или любой листовой металл подходящей толщины) Крышка подшипника 1 (2шт) Крышка подшипника 2 (2шт) (из АМГ 8) Задняя стенка - с запрессовкой подшипника (1шт) Передняя стенка - с запрессовкой подшипников (2шт) Средняя стенка - с запрессовкой подшипника (1шт) (из АМГ 6) Основанее Ну и после сборка... Я на стадии изготовления деталей :) По "паяльным работам".. Отпаял все тактовые кнопки для последующего соединения этих мест с кнопками с алиэкспресс, удлинил провода энкодера, питания, двигателя, светодиодов. Укоротил провода от блока питания и USB (переделав на "маму" для более удобного подключения. Припаял разъемы 9 пин "папа" со стороны энкодера двигателя (то есть со стороны базы рулевой) и аналогичный со стороны баттон бокса, спаял провод для их соединения. Паял, к слову, впервые в жизни, так что уверен, многое придётся переделывать.. ЧТО КАСАЕТСЯ БАТТОН БОКСА... Его чертеж решил сделать сам, пока в процессе. Но коробка-она и в Африке коробка) Планирую сделать стандартный бокс из аллюминия 3 и 6мм. с пазами. Внутрь распечатать на 3д принтере пластиковую вставку с пазами и посадочными местами под все платы, блоки, провода и прочую мешуру, что бы всё располагалось надежно и не болталось. Кнопки взяты с кнопок на руле, статичных лепестков и кнопках с самой базы. Светодиод-так же с базы, второй светодиод-с блока питания. Добавил выключатель (разомкнув цепь по "плюсу" от разъема питания базы. Остаются вопросы по заземлению (ещё не успел вникнуть что это такое и как правильно делается-можно ли всю "землю" кинуть на один корпус) ну и по сути дело только за часами работы, на которую по мере возможностей выкраиваю время) Короче на данный момент мой руль представляет собой валяющиеся провода, микросхемки, двигатель, набор ремней, метизов , а так же полные штаны энтузиазма и парочку чертежей.. Очень надеюсь домучать этот проект до конца октября. Очень интересно замерить изменения в работе и посравнивать с другими базами.. Ну а поделится "недостроем" решил, дабы получить хоть какой-нибудь фидбек, а то потихоньку угасать начинает желание всем этим заниматься из-за кучи бытовых факторов.. Думаю у многих тут так) Очень признателен за внимание!
Доброго дня! Лучшего названия для темы не придумал)) Внимательно следил за проектом рулевой базы от Caravangoes. Жутко впечатлен до сих пор! Безумно серьезная работа с такой эстетикой, что просто вне конкуренции (лично для меня). И до недавнего времени я даже мысли не допускал пытаться сделать что-либо даже супер отдалённо похожее, ибо кажется всё это сложным и недостижимым. Но попался в руки рассыпающийся Т500RS и из желания его перебрать плавно перенесся к проекту, который на данный момент готов примерно на половину. Итак. Разобрав Т500RS я был поражен инженерным идиотизмом. Обнаружил множество сколов пластика, раздолбанный ограничитель поворотов, вал со сколом из какого-то не самого приятного сплава и зубчатые ремни передачи. Для тех, кто не знает-Т500RS внутри весьма объёмного пластикового "обтекателя" представляет собой не слишком большую черную пластиковую коробочку с двумя металлическими пластинами (одна - основание с креплением струбцины, вторая - усиление лицевой части). Внутри находится собственно привод, двигатель, вал и прочие подробности. Сперва хотел просто переделать корпус для этой "коробочки" в стиле модов GREY WOLF, но по итогу решился на более радикальные изменения. В первую очередь, очень хотелось заменить зубчатые ремни на поликлиновые. Во-первых, они точно тише. Во-вторых, есть ощущение зубчастости (я в тех. части не силен, оперирую в основном домыслами и предположениями) и мне вот кажется, что это именно из-за зубчатых ремней, что как минимум логично звучит. В Фанатеке клабспорт стоят клиновые, 4pj, кажется, так что подумал, что взяв такие-же не прогадаю. Хотя задавался вопросом-почему сам Caravangoes использовал зубчатый. Возможно-мощности передаются выше и это необходимо, дабы избежать проскальзываний.. Так же хотелось максимальной монолитности конструкции. Что бы не было никаких люфтов, скрипов и прочего. От сюда следует использование металла в конструкции. Ну и в последнюю очередь подумал об эргономике. Никогда не разбирался ни в устройстве микросхем, ни в платах, ни в пайке и прочем-поэтому подумал, что всю эту конетель было бы удобно засунуть нахрен в отдельную "коробочку" и как нибудь потом разобраться. Со временем решил, что не плохая мысль построить всю логику будущих устройств следующим образом: -главным модулем идёт баттон бокс внутри располагаю все платы, блок питания. От него к двигателю и энкодеру будет идти своя "коса", так же разъем для провода питания и usb. Если теоретически делать проект не на базе Т500 а с нуля, можно будет создать большее количество разъемов под любую периферию. И кнопки будут не лишними, баттон бокс же вещь хорошая) А рулевую базу можно не перегружать проводами, платами и разъемами. -присоединяемым к нему идет модуль рулевой базы двигатель и энкодер соеденяются с разъмом на 9пин. Всё это через провод подключается к баттон боксу. Больше ни-ка-ких компонентов электронных на базе нет. по разъему конечно я допускаю собственный идиотизм, так как провода очень разной площади сечения. По хорошему это всё должно быть соединено иначе, но я решил рискнуть сделать так, всё равно для себя это делаю ну и проект можно сказать черновой) Приступил к созданию модели будущей базы. Мой уровень владения 3д редакторами-google скетч ап на твердую троечку. И тут я хочу просто 10005000 раз снять шляпу перед господином @Caravangoes . Помимо вдохновения, человек подарил ещё и свои наработки в открытом виде. Я не стал пренебрегать. Не долго думая, скачал 3д модель в формате под скетчап, удалил все не нужные мне узлы, затем наделал скриншотов с разных ракурсов и прямо в пейнте подрисовал всё то, что мне примерно нужно было создать по итогу. Отправившись к знакомому со всем этим делом через неделю получил переработанную версию. После определённых правок получил таки результат, которым более чем доволен. Было сохранено родное передаточное число 1\16 Был сохранен ограничитель поворотов (выполнили по аналогии с фанатековским, используя распорки в качестве направляющих). Оставили без изменений посадочное место под рулевое колесо (в планах сделать свой квик релиз), ну и очевидно, что конструкция именно ИЗМЕНЕНА, не создана с нуля. За такую возможность ещё раз сердечно благодарю @Caravangoes Для охлаждения будет использоваться родной радиатор (новый купить не удалось, специфический размер, а делать с нуля не особо захотелось), так же кажется, что теплоотводом будет служить и сам корпус руля, так как весьма большая площадь контакта у двигателя и центральной плиты. Из чего в итоге состоит база: Ремни 4PJ (356 и 483) 2 подшипника 16004 2 подшипника 628 4 подшипника 606 2RS или ZZ - без разницы, насколько я понял, так что какие нашел в своем городе, такие и купил :) а так же м5х20 - 15 шт. + шайбы м4х14 - 15 шт. + шайбы м6х40 - 2 шт. (с шайбами и гайками) - для натяжителей м4х12 - 15 шт. (потайные) - для крепления плит между собой м3х6 - 4 шт. (круглые) - для кронштейна разъема Указал всё с запасом) Так же нужен синий фиксатор резьбы. А может и красный.. Для токарных работ: (из Д16 или ближайших по свойствам сплавов-аналогов) Вал промежуточного шкива Вал рулевого колеса Шкив ведомый Шкив ведущий Шкив промежуточный распорка 1 (2шт) распорка 2 (4шт) Фланец крепления руля Шайба на фланец руля втулка натяжителя 1 втулка натяжителя 2 Для фрезерных работ: (АБС пластик или любой листовой металл подходящей толщины) Крышка подшипника 1 (2шт) Крышка подшипника 2 (2шт) (из АМГ 8) Задняя стенка - с запрессовкой подшипника (1шт) Передняя стенка - с запрессовкой подшипников (2шт) Средняя стенка - с запрессовкой подшипника (1шт) (из АМГ 6) Основанее Ну и после сборка... Я на стадии изготовления деталей :) По "паяльным работам".. Отпаял все тактовые кнопки для последующего соединения этих мест с кнопками с алиэкспресс, удлинил провода энкодера, питания, двигателя, светодиодов. Укоротил провода от блока питания и USB (переделав на "маму" для более удобного подключения. Припаял разъемы 9 пин "папа" со стороны энкодера двигателя (то есть со стороны базы рулевой) и аналогичный со стороны баттон бокса, спаял провод для их соединения. Паял, к слову, впервые в жизни, так что уверен, многое придётся переделывать.. ЧТО КАСАЕТСЯ БАТТОН БОКСА... Его чертеж решил сделать сам, пока в процессе. Но коробка-она и в Африке коробка) Планирую сделать стандартный бокс из аллюминия 3 и 6мм. с пазами. Внутрь распечатать на 3д принтере пластиковую вставку с пазами и посадочными местами под все платы, блоки, провода и прочую мешуру, что бы всё располагалось надежно и не болталось. Кнопки взяты с кнопок на руле, статичных лепестков и кнопках с самой базы. Светодиод-так же с базы, второй светодиод-с блока питания. Добавил выключатель (разомкнув цепь по "плюсу" от разъема питания базы. Остаются вопросы по заземлению (ещё не успел вникнуть что это такое и как правильно делается-можно ли всю "землю" кинуть на один корпус) ну и по сути дело только за часами работы, на которую по мере возможностей выкраиваю время) Короче на данный момент мой руль представляет собой валяющиеся провода, микросхемки, двигатель, набор ремней, метизов , а так же полные штаны энтузиазма и парочку чертежей.. Очень надеюсь домучать этот проект до конца октября. Очень интересно замерить изменения в работе и посравнивать с другими базами.. Ну а поделится "недостроем" решил, дабы получить хоть какой-нибудь фидбек, а то потихоньку угасать начинает желание всем этим заниматься из-за кучи бытовых факторов.. Думаю у многих тут так) Очень признателен за внимание!
- 2 ответа
-
- 13
-
-
- mod
- clubsport wheelbase
- (и ещё 3 )
-
Всем привет. Я построил первую работоспособную игрушку по принципу "из того что нашёл". Уже испытана в Assetto Corsa. Не люфтит, не громыхает как ведро с болтами. Ход рычага соответствует пропорциям плиты из эпоксидки. Статья, посвящённая сборке, опубликована на Zen.Yandex в двух частях: Часть первая. Подготовка. Часть вторая. Сборка. Видео, демонстрирующее работу механизма:
-
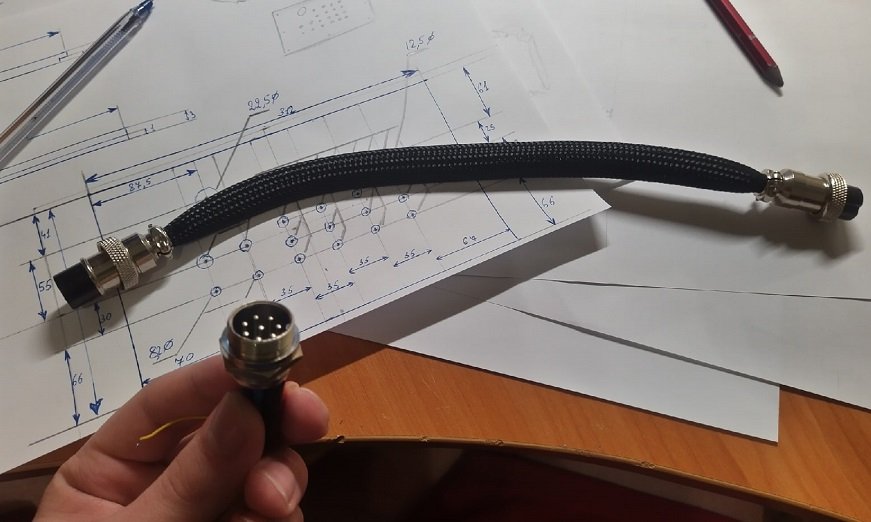
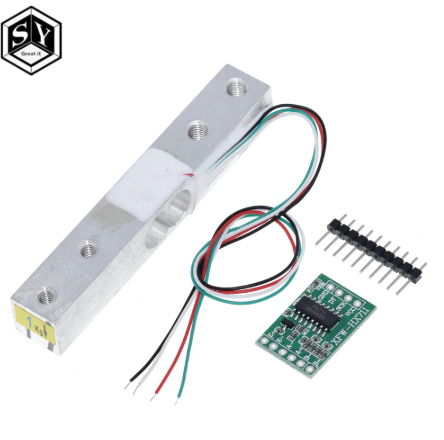
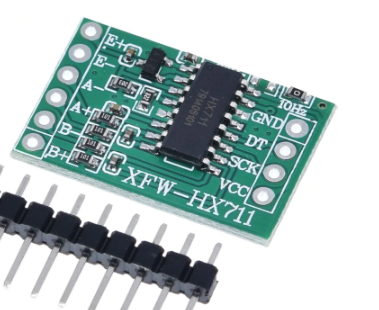
 Планирую сделать себе педали, задумываюсь о решении всунуть в них 3 тензодатчика такого типа: Педаль газа, сцепления (предварительно 5кг) Педаль тормоза (20кг) В комплекте идут усилители XFW-HX711: Собственно вопрос: Как мне это все законектить и вывести на разъем rj12 для подключения к базе руля на основе платы STM32F4VE с прошивкой MMOS FFB 2014. Буду благодарен за ответы и возможные корректировки, буду прислушиваться к советам по улучшению.
Планирую сделать себе педали, задумываюсь о решении всунуть в них 3 тензодатчика такого типа: Педаль газа, сцепления (предварительно 5кг) Педаль тормоза (20кг) В комплекте идут усилители XFW-HX711: Собственно вопрос: Как мне это все законектить и вывести на разъем rj12 для подключения к базе руля на основе платы STM32F4VE с прошивкой MMOS FFB 2014. Буду благодарен за ответы и возможные корректировки, буду прислушиваться к советам по улучшению.
-
Всех приветствую! Друзья, может кто подскажет, существуют ли проекты симуляторов (а конкретно-рулевых баз), в основе которых лежит не использование двигателя для непосредственного вращения вала руля, а нечто вроде "беговой дорожки" для имитации работы подвески, сцепления (резины и покрытия) и прочего. То есть вращается под условным валиком, играющим роль колёс, некое покрытие и все физические процессы симулируются за счёт сил трения, сопротивления и давления. Буду очень благодарен за любую информацию или мысли на этот счёт, а конкретнее: -будет ли в теории от такой разработки практический смысл (даст ли преимущество относительно DD) -было ли замечено вами что-то похожее на просторах интернета Благодарю за внимание!
-
 Покатавшись немного в LMS серии iRacing, я понял, что двух кнопок на руле мне явно маловато. Руль менять не планирую, т.к. G25 меня вполне устраивает, поэтому решил сделать дополнительные кнопки на руль. По сути это тот же ButtonBox, только крепящийся на руле. С конструкционной стороны я особых проблем не вижу, уже есть примерное представление как это всё будет выглядеть в виде напечатанного на 3Д принтере макета. Может быть разверну кнопки так, чтобы они были полукругом вокруг существующих и при этом развернуты к большим пальцам для большей эргономичности. Плюс думаю сделать конструкцию модульной. А вот как все эти кнопки подружить с компьютером - вопрос. На форуме нашёл тему DYI arduino buttonbox, где подробно расписано как и что делать, но у меня всё ещё есть вопросы. Уже заказал на АлиЭкспресс кнопки: ссылка. А какой заказать контроллер? Такой пойдёт: ссылка? Как всё это паять? Нужна плата? Питание нужно отдельное? Что ещё нужно для проекта? Буду рад любой помощи форума.
Покатавшись немного в LMS серии iRacing, я понял, что двух кнопок на руле мне явно маловато. Руль менять не планирую, т.к. G25 меня вполне устраивает, поэтому решил сделать дополнительные кнопки на руль. По сути это тот же ButtonBox, только крепящийся на руле. С конструкционной стороны я особых проблем не вижу, уже есть примерное представление как это всё будет выглядеть в виде напечатанного на 3Д принтере макета. Может быть разверну кнопки так, чтобы они были полукругом вокруг существующих и при этом развернуты к большим пальцам для большей эргономичности. Плюс думаю сделать конструкцию модульной. А вот как все эти кнопки подружить с компьютером - вопрос. На форуме нашёл тему DYI arduino buttonbox, где подробно расписано как и что делать, но у меня всё ещё есть вопросы. Уже заказал на АлиЭкспресс кнопки: ссылка. А какой заказать контроллер? Такой пойдёт: ссылка? Как всё это паять? Нужна плата? Питание нужно отдельное? Что ещё нужно для проекта? Буду рад любой помощи форума. -
 Всем доброго времени суток, хорошего и доброго настроения. Близится зима (ноябрь.2019) чувствую что пора вкатится снова в симрейсинг, но оборудование уже никакого не осталось, а покупать что-то готовое не хочется, поэтому Начинаю постройку своего Первого руля. до этого я строил 2DOF и даже построил) но он мне не очень то и зашел по итогу этот отчет нужен чтобы я все не забросил на пол пути, или из-за трудностей постройки соблюдая баланс цена/качество, получится крайне эффективно и бюджетно. Стартовый набор: Видео Инструкции и софт находятся ТУТ, клац клац 1 Ардуино Leonardo R3 2 h-мост VNH2SP30 3 DC Двигатель MY6812 Dc 150w 12вольт 4 Энкодер E6B2CWZ1X OMRON 1000pr 5 Силовые транзисторы NPN BC547 TO-92 45 V/0.1A 6 Ременный шкив общая схема выглядит примерно так: Жду посылку и приступаю. На данный момент затраты около 5к рубл
Всем доброго времени суток, хорошего и доброго настроения. Близится зима (ноябрь.2019) чувствую что пора вкатится снова в симрейсинг, но оборудование уже никакого не осталось, а покупать что-то готовое не хочется, поэтому Начинаю постройку своего Первого руля. до этого я строил 2DOF и даже построил) но он мне не очень то и зашел по итогу этот отчет нужен чтобы я все не забросил на пол пути, или из-за трудностей постройки соблюдая баланс цена/качество, получится крайне эффективно и бюджетно. Стартовый набор: Видео Инструкции и софт находятся ТУТ, клац клац 1 Ардуино Leonardo R3 2 h-мост VNH2SP30 3 DC Двигатель MY6812 Dc 150w 12вольт 4 Энкодер E6B2CWZ1X OMRON 1000pr 5 Силовые транзисторы NPN BC547 TO-92 45 V/0.1A 6 Ременный шкив общая схема выглядит примерно так: Жду посылку и приступаю. На данный момент затраты около 5к рубл
-
 Друзья многие из вас намучались с рулями от Лоджитека но не имеют возможности приобрести ни Accuforce ни Fanatec, ни упаси господи Leo Bondar. У многих встал вопрос о OSW, но выходит бюджетнее чем любой из DD, но все равно over 1,5k $, Есть российский производитель серводвигателей, который их сам и разрабатывает, находится у меня здесь в питере. Я коснулся темы лишь поверхностно и примерно понимаю какой должен использоваться двигатель в прямом приводе, но остальное я хз, что с блоком управления на основе IONI и есть ли аналоги, просьба всем сведущим в данной области написать в комментах что конкретно необходимо найти на нашем рынке. Вот кстати копия переписки с представителем завода: mss@dmotor.ru 11:24 (0 мин. назад) Здравствуйте. По вашему запросу можем предложить сервопривод Estun Servo E-4-2-0-100 или Servo-E-4-8-0-100 http://dmotor.ru/servo-1-4.htm Стоимость комплектов 69 000 и 90 900 руб соответственно. Вы писали 02 June 2016, 23:27:50: Здравствуйте, меня интересует наличие и цена следующих вещей: Сервопривод с характеристиками аналогичными аналогу Mige 130ST-M10010 (1кВ, 10Нм) А также блок управления для него с USB интерфейсом и питанием 220В (переменный) назначение: использование в конструкции стенда симуляции вождения гоночного автомобиля на базе симулятора Iracing, тип привода: прямой , ротор используется как рулевой вал через быстросъемный переходник. Скажите возможно ли это и какие цены на российскую продукцию С Уважением, Семенов Дмитрий SIPAN-TORG +79500483428 Как видно комплект сервопривода выходит около 100$ вместе с блоком питания, это круто я думаю, но что еще необходимо?
Друзья многие из вас намучались с рулями от Лоджитека но не имеют возможности приобрести ни Accuforce ни Fanatec, ни упаси господи Leo Bondar. У многих встал вопрос о OSW, но выходит бюджетнее чем любой из DD, но все равно over 1,5k $, Есть российский производитель серводвигателей, который их сам и разрабатывает, находится у меня здесь в питере. Я коснулся темы лишь поверхностно и примерно понимаю какой должен использоваться двигатель в прямом приводе, но остальное я хз, что с блоком управления на основе IONI и есть ли аналоги, просьба всем сведущим в данной области написать в комментах что конкретно необходимо найти на нашем рынке. Вот кстати копия переписки с представителем завода: mss@dmotor.ru 11:24 (0 мин. назад) Здравствуйте. По вашему запросу можем предложить сервопривод Estun Servo E-4-2-0-100 или Servo-E-4-8-0-100 http://dmotor.ru/servo-1-4.htm Стоимость комплектов 69 000 и 90 900 руб соответственно. Вы писали 02 June 2016, 23:27:50: Здравствуйте, меня интересует наличие и цена следующих вещей: Сервопривод с характеристиками аналогичными аналогу Mige 130ST-M10010 (1кВ, 10Нм) А также блок управления для него с USB интерфейсом и питанием 220В (переменный) назначение: использование в конструкции стенда симуляции вождения гоночного автомобиля на базе симулятора Iracing, тип привода: прямой , ротор используется как рулевой вал через быстросъемный переходник. Скажите возможно ли это и какие цены на российскую продукцию С Уважением, Семенов Дмитрий SIPAN-TORG +79500483428 Как видно комплект сервопривода выходит около 100$ вместе с блоком питания, это круто я думаю, но что еще необходимо?