Rezinoviy_Ded
-
Постов
23 -
Зарегистрирован
-
Посещение
Достижения Rezinoviy_Ded
")
Newbie (1/14)
7
Репутация
-
 @Beg С моим экземпляром получилось, отлично. С этим разобрались. Ну а теперь самая долгая и нудная часть - подключение россыпи кнопок к плате. Караван как-то в своей теме делился распиновкой STM32F4 под кнопки G27. Вот мне нужно то же самое, но для STM32F103VET6. Видел где-то распиновку моей платы с тремя или четырьмя кнопками, но у меня то их двенадцать. Да ещё плюс четырёхпозиционный джойстик в центре баранки. К каким выводам можно/нужно всё подключать я не знаю.
@Beg С моим экземпляром получилось, отлично. С этим разобрались. Ну а теперь самая долгая и нудная часть - подключение россыпи кнопок к плате. Караван как-то в своей теме делился распиновкой STM32F4 под кнопки G27. Вот мне нужно то же самое, но для STM32F103VET6. Видел где-то распиновку моей платы с тремя или четырьмя кнопками, но у меня то их двенадцать. Да ещё плюс четырёхпозиционный джойстик в центре баранки. К каким выводам можно/нужно всё подключать я не знаю. -
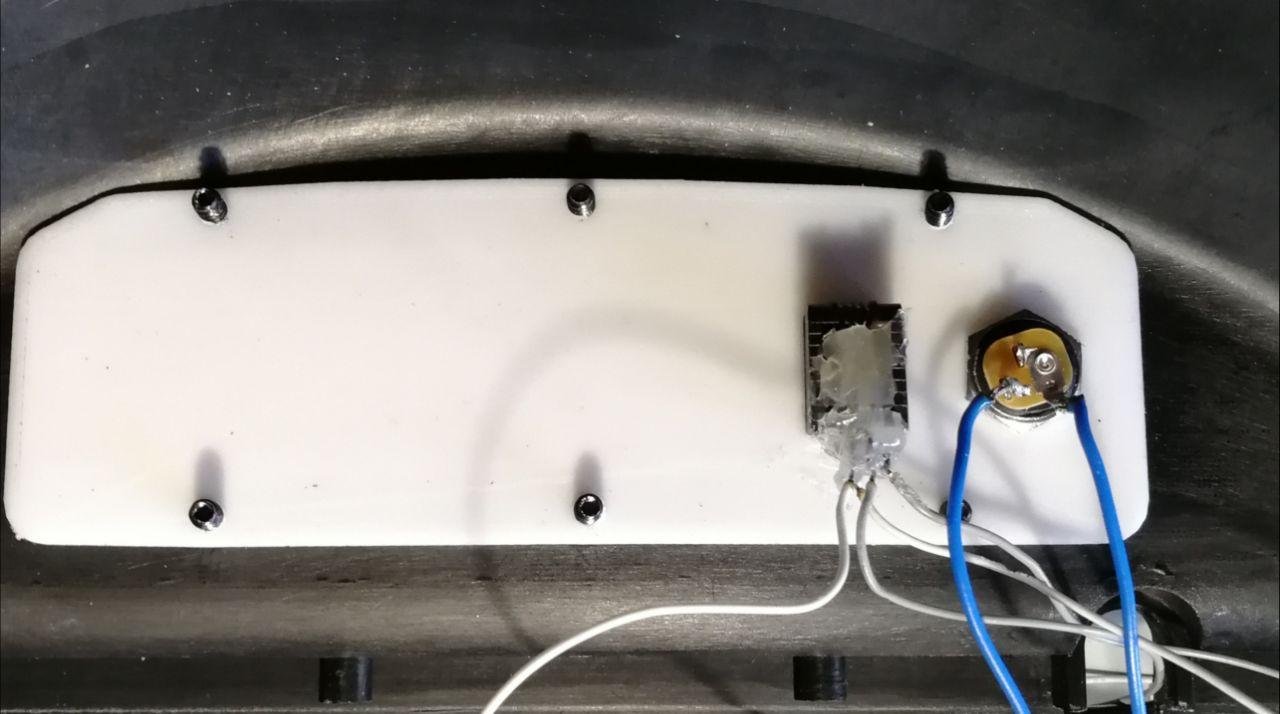
И так, продолжаем издеваться над ископаемым! Кстати я нашёл наклейку с годом присвоения гарантии - "Warranty: 12 2003". Я долго разглядывал "зияющую пропасть" в панцире этого руля, оставшуюся после извлечения штатной логики и разъёма под картриджи. Прикидывал как размещу разъёмы на будущей заглушке. Прикинул, нарисовал деталь. Сойдёт, подумал я, и отправил на печать. Сам занялся долгожданной проверкой. Прежде чем заниматься подключением штатных кнопок и лампочек, надо хотя бы убедиться что эта конструкция хоть сколько-то жизнеспособна. Втыкаю в комп, подключаю БП. Странно, руль какой-то ватный. Хотя в настройках всё на нуле. Отключаю БП. Руль всё ещё ватный, как будто что-то мешает проворачивать вал. (Я забеспокоился, наверное подшипникам хана.) Совершенно расстроенный отключаю STM32 от компа, уже подумываю об очередной разборке руля, замене подшипников и случайно проворачиваю руль... Он крутится легко! Я задумался. Как такое может быть? Подключаю к usb ещё раз. Руль снова ватный. Недоверчиво проверяю БП, он всё ещё не подсоединён к рулю. Как!? Откуда на моторе такой ток, который приводит к созданию поля, препятствующего свободному вращению вала? Конечно после я поигрался с настройками MMos ForceFeedback, но безрезультатно. Утилита не причём. Сижу теперь, много думаю. Тем временем заглушка распечатана. Следом распечатал "столик" для STM32. А чтобы не приклеивать его к днищу руля, распечатал уголок, который можно надеть на корпус одной из струбцин. Склеено, прикручено и установлено. Новое наблюдение. Если проворачивать руль медленно, сопротивления он не встречает. Как только я начинаю резко проворачивать его, ощущается встречный толчок. Но, минуточку. БП я не подключал. Как такое может быть?

-
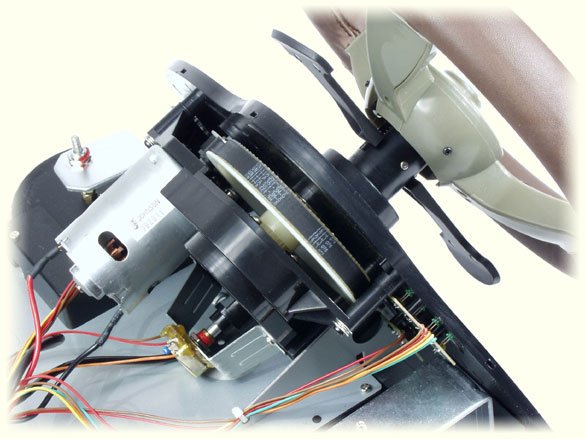
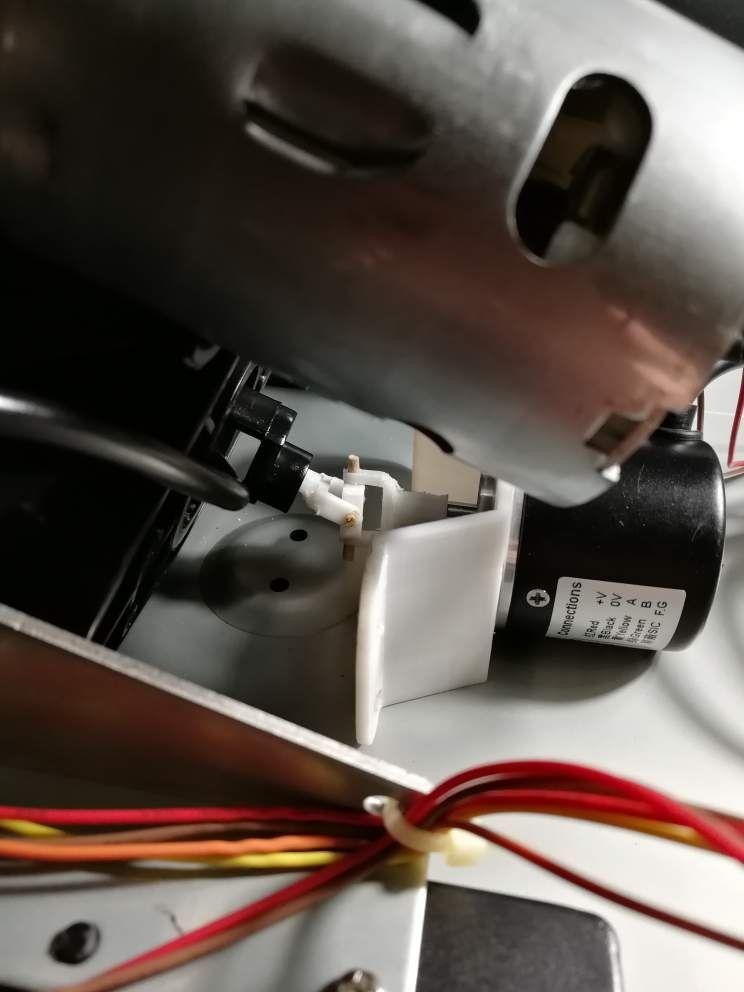
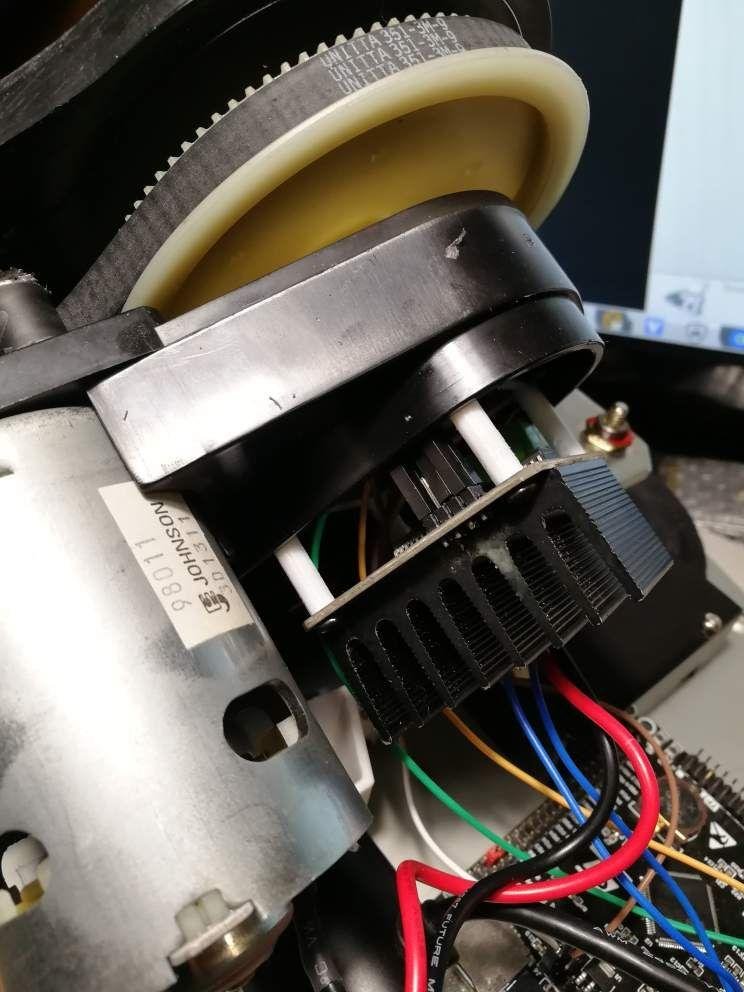
Чрезвычайно редкая игрушка. В годы выпуска был мало распространён на территории СНГ. Найти такой сегодня очень трудно. Оплётка мягкий кожзам, станина из толстого металла, металлические струбцины с удобными колёсиками и клёвые подрулевые лепестки. Ну и самое главное, собственно из-за чего я его купил - ременной привод! Да, у игрушки, разработанной ещё "до нашей эры" были ремни. Недостатков два: потенциометр в качестве датчика положения вала, совместимость драйверов только с древними системами (Windows 98, Windows ME). Продали мне его полностью рабочим, но проверять это я всё равно не стал. Заводская логика не нужна. Я сразу её выкрутил и выбросил)) Вместе с потенциометром. Настал черёд создания крепления для оптического энкодера, платы BTS7960 и ардуино с прошивкой EMC Lite. Тут меня ждало разочарование. Ардуино на этой прошивке не работает с драйвером BTS7960. На всякий случай проверил драйвер на плате STM, работает. Ну что ж, это уже вторая попытка подружиться с этой прошивкой, прошлый раз EMC не захотел работать с энкодером от принтера, который работает на этой же плате с прошивкой AI Wave 2016. Кстати BTS7960 так же был проверен на прошивке Ai Wave. В топку, как говорится. А мы переходим к тому что гарантированно работает. К stm32. Убедившись что энкодер не влезает в штатное место потенциометра (даже без кожуха) я решил нарисовать для него станину и микроскопический кардан, который будет вставлен в штатное место потенциометра. Приложил, примерил, рассчитал расстояние и прикрутил. Всё отлично, как будто так и было. С BTS7960 проделал ту же процедуру. Нарисовал "столешницу" на четырёх ногах и вклеил её на кожух одного из шкивов. Уместился миллиметр в миллиметр, как будто так и было задумано заводом. Подключил к компу, приступил к тестам. Выяснилась интересная особенность. Если направление вращения энкодера совпадает с направлением вращения баранки в программе, мотор стремится докрутить вал за пределы ограничителя. Т.е. если я проворачиваю руль к границе установленных 540 градусов, логично что руль должен остановиться. Но вместо этого он начинает проворачивать его дальше, до бесконечности. В любую сторону. Я задумался. А что если переставить контакты энкодера А и Б местами? Переставил, запустил тест. Теперь в программе руль вращается противоположно вращению энкодера. Но, внезапно, ограничение работает нормально. Ха! Да нужно просто включить инверсию в настройках утилиты MMOSFFB, раз всё заработало! Включаю инверсию, мотор начинает работать противоположным ожидаемому образом. Ну т.е. снова проворачивает его дальше в "точке границы". Я сделал ещё несколько комбинаций с включением\выключением инверсии и перестановкой контактов А и Б. Результат - мотор нормально ограничивает вращение руля (да и вообще создаёт обратную связь) только с показаниями энкодера, противоположными направлению вращения вала. Решения пока не придумал.Продолжение следует.
-
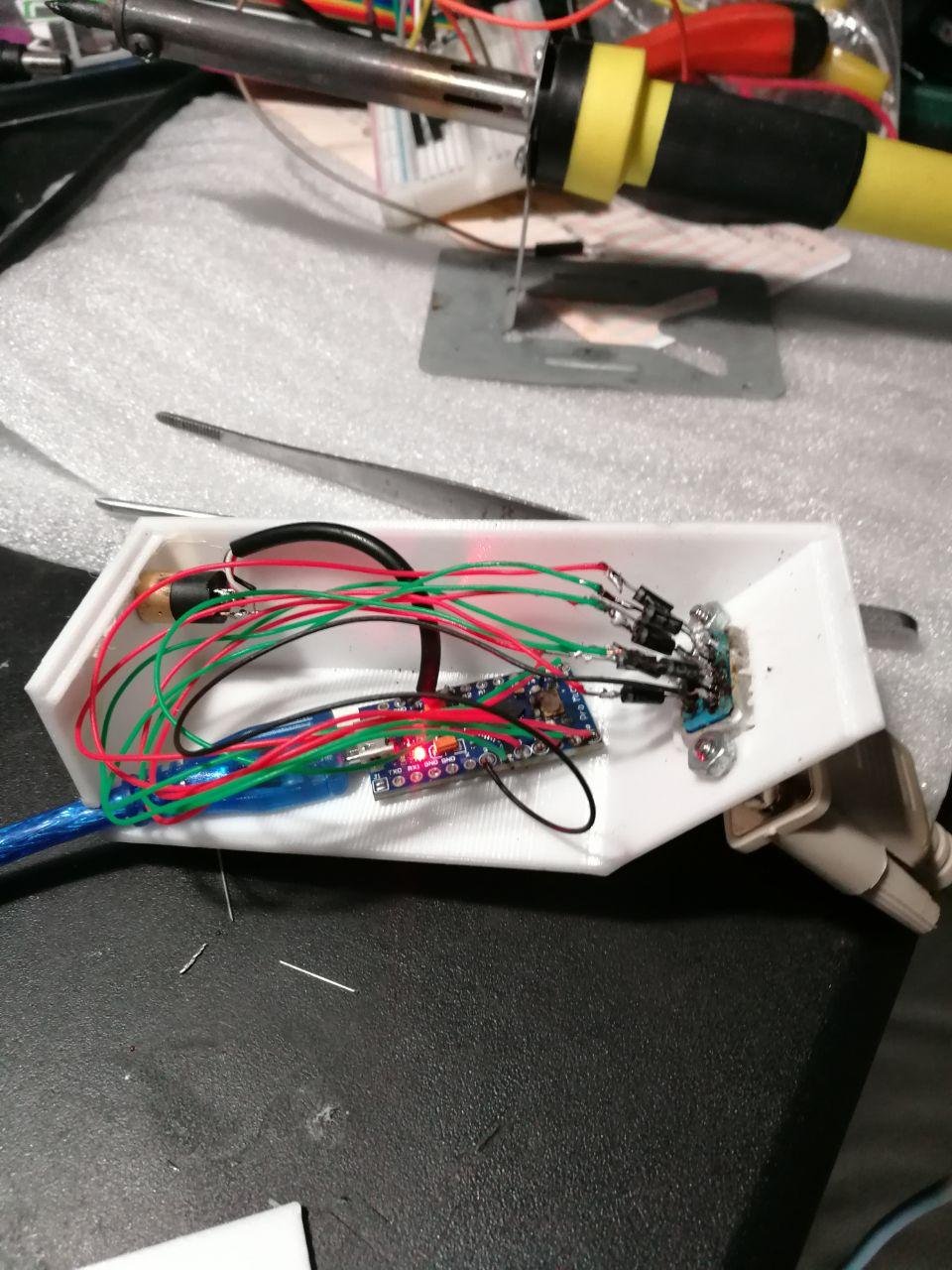
Немного усовершенствовал коробку. От старой плиты из смолы пришлось избавиться, она лопнула, когда я неудачно опёрся на рычаг. Я в очередной раз пожалел, что не армировал её сразу... Но ничего. Новая плита лучше старой сразу по нескольким причинам: Она ровнее. Тоньше. "Направляющие" скошены согласно направлению движения рычага от передачи к передаче. Каждая направляющая армирована винтом (прочность на века). Для платы arduino pro micro нарисовал корпус, который был распечатан на 3д-принтере. Впоследствии я закреплю этот корпус на мягкую липучку к корпусу ПК. COM-порт, к которому подключена КПП, будет смотреть вверх, разъём для педали сцепления останется сзади. Пока что коробочка просто болтается на проводах. Так же к плате я подключил педаль акселератора от какой-то лодки в качестве сцепления. Купил её на Aliexpress за 700 рублей. Учитывая что педаль из металла и на датчике Холла, ценник справедливый (уже испытана в Assetto Corsa). Педаль прикручена к узкой кювете для клея. Цвет кюветы стрёмный, может потом перекрашу))
-
Это называется "вкусовщина", не имеющая ничего общего с перечисленным. Для кого-то эстетика - это чёрная коробка, болтающаяся на проводе под столом. Практичнее? Ну ну. Так себе аргумент. Вкусовщина.
-
Просто потому что @Sieben так сказал, его нужно вытащить! Чё, не понимашь что ли? XD Какая разница зачем. Не задавай вопросов, просто делай!
-
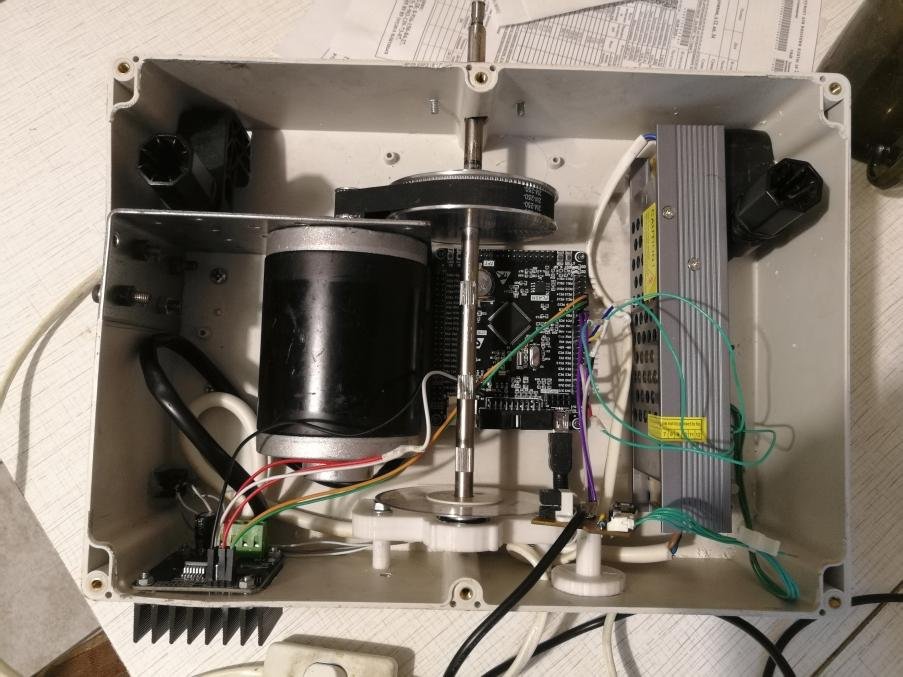
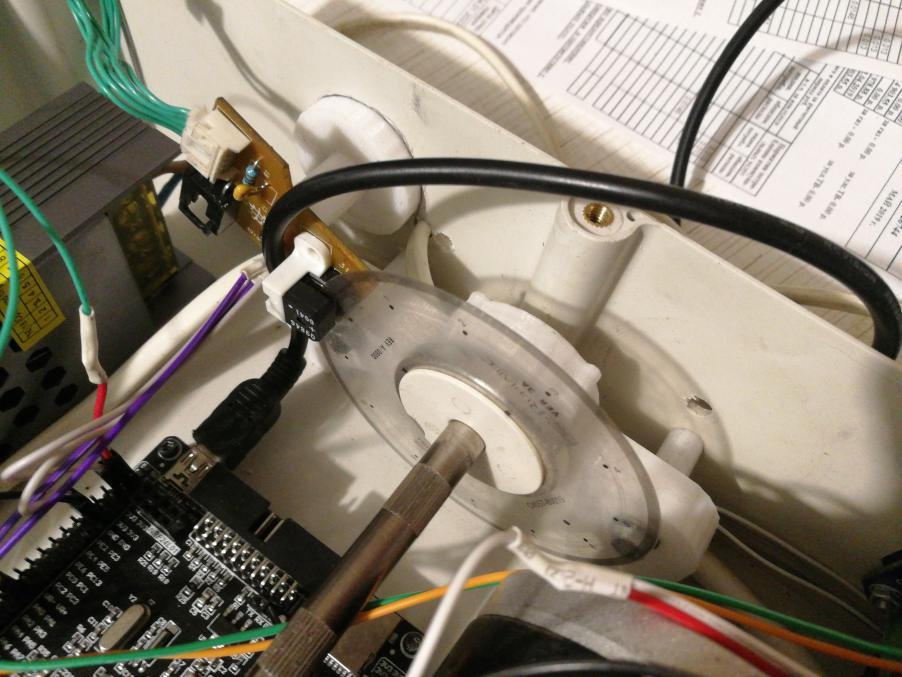
Проблема решена! Колечко и по два витка каждого сигнального провода Слава ферриту, чудесному радиоматериалу! Хорошо я помню про него. Уже тестирую wheelcheck'ом. Ну и дурь. Если этот мотор раньше взрослого человека на самокате таскал... Но отступать уже поздно)) На распечатанных опорах стоит как влитой. Корпус как будто был придуман для моих издевательств, спасибо китайскому заводу герметичных ящиков. И так. В Т500RS стоит 65 ваттный мотор, и он считается очень мощной базой. Чего уж про мои 100 говорить. Так что пожалуй на всю использовать я его не буду, смысла нет, это ж не станок какой-нибудь. Но пару раз запустить в цикле и посмотреть как вращается в режиме "Максимум пауа" надо, дабы убедиться в прочности соединений. "Больше скорость - меньше ям!" жаль не помню кто сказал...
-
Надо попробовать две вещи: заменить двухжильный провод на трёхжильный с евровилкой и заземлением, надеть на провода энкодера ферритовое кольцо. Пока что ни того ни другого нет.
-
И так, есть определённые выводы. Я догадываюсь в чём дело, но по порядку: Если выключен БП, то с энкодера можно получить показания. Т.е. энкодер однозначно исправен и правильно подключен. Если отключить драйвер мотора от платы (т.е. совсем), включить БП и посмотреть показания с энкодера я снова увижу "убегающие" в любую сторону показания. Отсюда вывод. Драйвер мотора не причём, да и сам мотор тоже. Это наведённое напряжение от БП, совершающего работу. Корпус базы конечно просторный, но места всё равно недостаточно, чтобы убрать провода куда-то в другое место. Я пробовал приподнять БП и сдвинуть его в сторону, не помогло. Значит поле достаточно большое. Кажется предстоит новая переделка базы. Эхх, а я уже собрался прокатиться на этой страховидле((
-
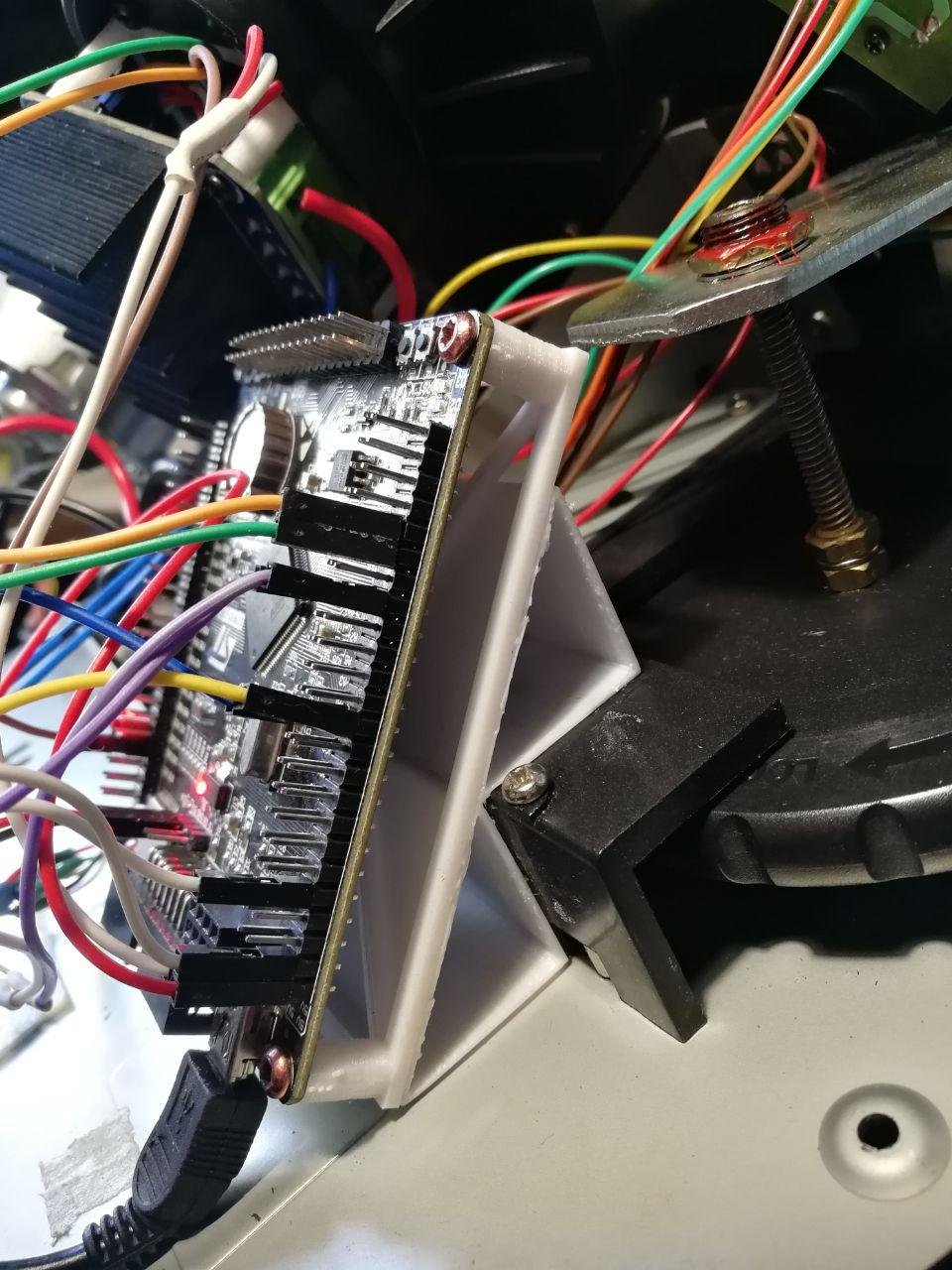
После сборки получилось нечто очень страшное. И это несмотря на то, что крепления я нарисовал в САПР и распечатал на принтере... Но пользоваться им пока нельзя. Кнопок ещё нет, передачи не переключишь. А показания с энкодера считываются лишь до тех пор, пока выключен электромотор. Показания с педалей тоже считываются, всё хорошо. Стоит на мотор подать питание, как энкодер показывает крайнее правое положение. Ну или левое, по всякому бывает. Мотор при этом около минуты вращается в одну сторону, затем начинает вращаться в другую. Контакты BTS задействовал LPWM,RPWM,R_EN,L_EN,VCC,GND. И так до бесконечности... Device Setup: PWM (H-Bridge) 8.2 Khz CPR 12000 Analog Axes RX, RY Эксперименты продолжаются.
-
Нашёл умного мужика, он показал какие выводы соединять (BOOT0 и 3V). Напишу руководство по утилите DfuSe с картинками, если будет не лень. Сильно сократит время на поиски инфы для таких новичков как я. Плата прошита, отлично. Колхозим дальше. Так, энкодер ни в какую не работал на ардуино с прошивкой Ebolz Magy, посмотрим как он поведёт себя на этой плате. Успех. Прошивка микроконтроллера MMos_FW_0.99.2 прекрасно справилась с задачей. Показания с энкодера принтера HP считываются. Теперь надо научиться делать матрицы из кнопок, ибо КПП на отдельной плате Arduino Pro Micro временное решение. Запихать всё это внутрь корпуса и наконец придумать способ затянуть эти проклятые винты. У меня от проскальзывания винтов уже борозды появились на оси. Натяжения хватает не надолго, винты разбалтываются((
-
@Buxou привет. Возникли проблемы на стационарном компе. Выручил нетбук. На нём прошивка прошла без проблем с первой попытки. Мне приехала плата STM32_F4VE. И вот тут начинается самое интересное. Я не знаю как её прошить)) На плате есть разъём microusb, догадываюсь что это возможно сделать через него. Однако по запросу "прошивка STM32 F4XX" на меня выливается целый океан информации. Нашёл две версии ST-Link, затем STM32_HID bootloader. Потом случайно выяснил что для прошивки других STM нужны особые платы, через которые прошивки и заливаются. Возможно не мой случай, но подозрения закрадываются, ибо после установки ST-Link устройство не опозналось компом. Искал отдельно драйверы, поставил, тот же результат. Попробовал три разных провода для теста. Варианта два: брак платы; я что-то делаю не так. Расследование продолжается...
-
@Sieben Зачем мне этот ролик?)) Я видел его, он очень давно по интернету гуляет.
-
Всем привет. Я построил первую работоспособную игрушку по принципу "из того что нашёл". Уже испытана в Assetto Corsa. Не люфтит, не громыхает как ведро с болтами. Ход рычага соответствует пропорциям плиты из эпоксидки. Статья, посвящённая сборке, опубликована на Zen.Yandex в двух частях: Часть первая. Подготовка. Часть вторая. Сборка. Видео, демонстрирующее работу механизма:
-
Боюсь название я уже не поправлю в теме. Забей. Ну так что, господа. Вы похвастались более дешёвыми энкодерами. Какой заказать? Тест энкодера DFGT показал значение 3200 cpr. Его можно взять за эталонный.