Поиск
Показаны результаты для тегов 'mmos'.
Найдено 4 результата
-

DIY FFB steering wheel
Caravangoes опубликовал тема в Всё для симрейсинга - Рули, сиденья, железо для ПК
Приветствую, уважаемые коллеги по интересам! Заметил, что на форуме начали появляться и обсуждаться проекты самодельных FFB рулей. Тема для меня очень интересная по нескольким причинам: 1) Мой G27 по мере глубокого погружения в симуляторы перестал меня устраивать по некоторым параметрам, а если точнее, то по всем. 2) Постоянно у меня руки чешутся - дай чего придумать и смастерить. Решение первого пункта для многих очевидно: покупаем топовый девайс и всё сразу станет хорошо. Но это не наш метод. Руки-то чешутся, а амбиции зашкаливают. Потому хочу представить общественности свой скромный проект: В качестве управляющей электроники решено было использовать плату STM32 discovery board с прошивкой MMOS FFB Думаю, для многих не секрет, что наши немецкие коллеги-энтузиасты уже давно сделали и обнародовали схемы и прошивку для STM32, которая после легла в основу ПО для Simucube OSW. STM32 с данной прошивкой может легко организовать нам фидбэк посредством двигателя постоянного тока через соответствующий драйвер (H-Bridge) В качестве привода FFB будем использовать сервомотор постоянного тока 24v (DC servo motor) с отрезанным энкодером. Энкодер вместе с его корпусом отрезал за ненадобностью, т.к. привод будет не прямой, а с редукцией и осуществляться будет посредством ремня. Почему именно такой мотор? Так сложились звёзды. Таких мотора у меня два, достались они совершенно бесплатно в состоянии - муха не сидела. Низкооборотистый и очень моментный мотор. Без нагрузки при 24v прибор насчитал 940rpm. Диаметр мотора 80мм. Управлять этим маленьким моторчиком поручено драйверу bts7960 - подходящие характеристики и доступная цена. Единственный момент: нужно брать оригинал, неоригинал за $5 очень сильно греется и весело горит. Чтобы симулятор понимал, на какой угол повёрнут наш руль, следить за ним будем с помощью роторного энкодера, который будет установлен непосредственно на вал рулевого колеса. Используем китайскую копию OMRON E6B2CWZ6C 1000ppr (что означает 4000cpr) с индексом, для того, чтобы наша база запоминала центр и при каждом включении калибровалась. Для механики привода будем использовать то, что уже имеется - пару алюминиевых шкивов HTD3M 20t и 72t под ремень 15мм. Мои очень примерные расчёты подсказывают, что такое соотношение должно подойти и по скорости и по мощности. А если вдруг что-то пойдёт не так - будем варьировать диаметром ведущего шкива, благо есть в наличии 12t, 15t, 20t, 22t, 24t. Ремешок используем с кевларовым кордиком, т.к. из-за относительно небольшого диаметра ведомого шкива работа ремешку предстоит нелёгкая. Для сборки с ведущим шкивом 20t понадобится ремень на 96 зубов - HTD3M 288. Остальная механическая часть - дюраль и амг. Будет много токарки и фрезеровки. Дабы убедиться в том, что принципиальная схема с использованием платы, энкодера, драйвера и мотора будет работать правильно, нужно было собрать макет. На коленке, с использованием механики очень старого trust ff380, его родного моторчика была собрана принципиальная связка компонентов, которая (не без бубна и танцев) заработала как полагается. Осталось дело за малым - воспроизвести всё в соответствие с чертежами.- 3125 ответов
-
- 24
-

-

-
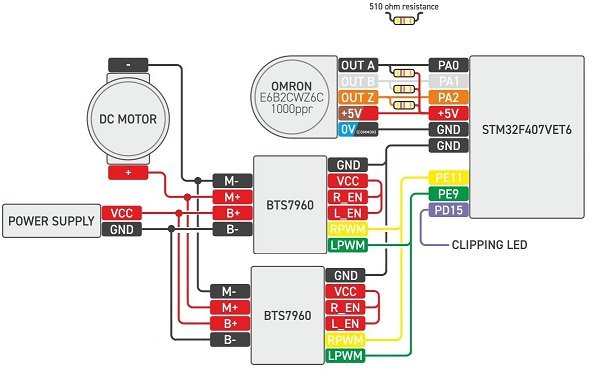
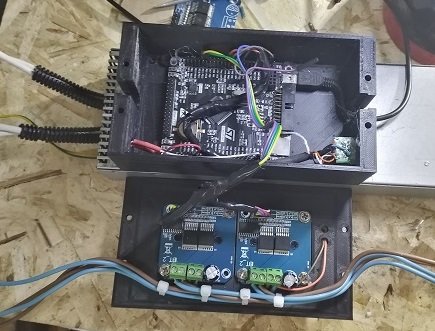
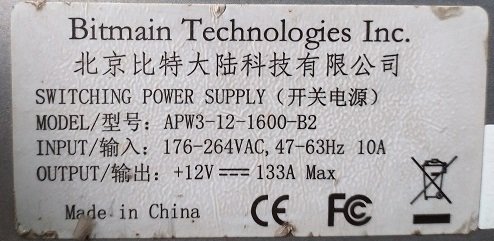
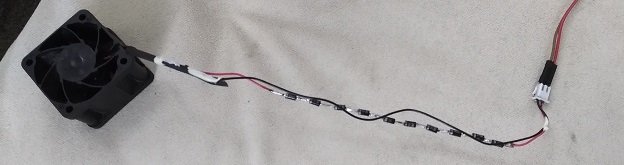
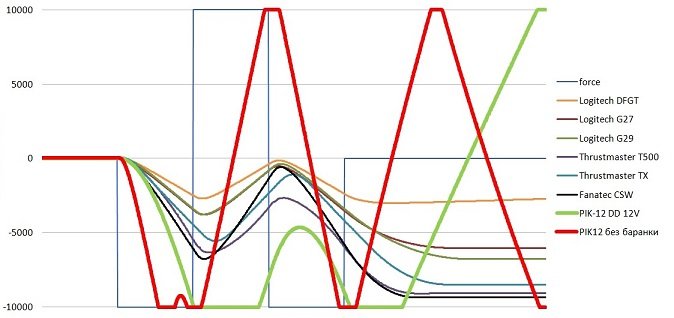
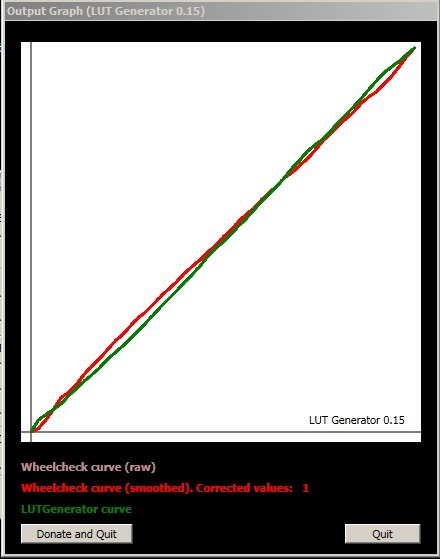
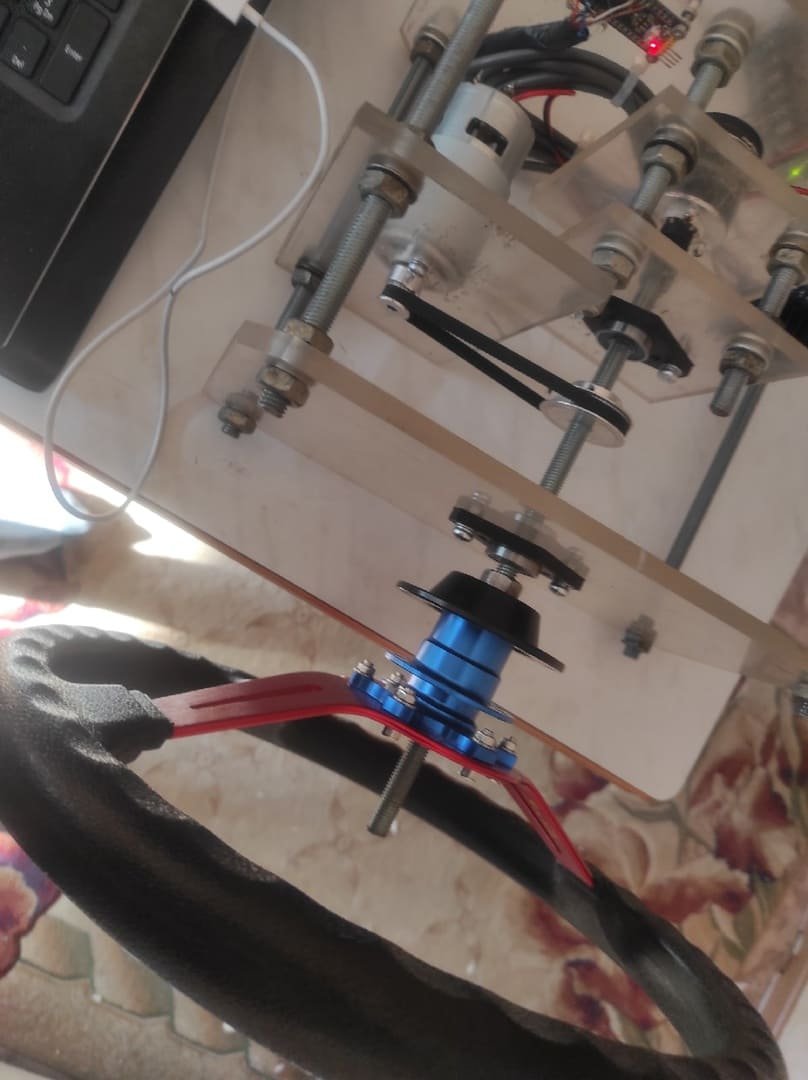
 Всем привет, решил я создать отдельную тему под свой проект, перед началом я бы хотел выразить благодарность за технические консультации следующим пользователям портала: @Caravangoes @DarkGracius ну что, погнали! :) в поисках б/у коллекторного мотора постоянного тока типа MY1020 ну и "подобных", совершенно случайно наткнулся на Болгарский двигатель PIK-12 3/10-1 в состоянии почти нового, и после консультаций с @DarkGracius и изучении его темы на подобном моторе https://forum.simracing.su/topic/3830-narodnyy-directdrive-na-motorah-postoyannogo-toka/ был начат свой проект со своим видением прекрасного :) задняя крышка была просверлена для установки корпуса/держателя энкодера (omron 600 ppr) вал просверлен сверлом на 5мм, нарезана резьба м6, вкручена шпилька для соединения с муфтой энкодера, корпус/держатель энкодера напечатан на 3д принтере заменил штатные провода на мотор (использовал кабель КГхл 2х4мм) для крпеления мотора в гараже был найден "маленький" уголок 75х75х6 мм выпелен, просверлен и покрашен на вал мотора установлена 3д печатная быстросъемная муфта быстросъемная муфта представляет из себя разрезанное шлицевое соединение, сжимаемое зажимом-эксцентриком ну и для "+15 лошадей" мотор был обтянут пленкой под карбон на этот "настольная" часть была закончена от мотора идет жгут проводов (силовой кабель на мотор и экранированый кабель на энкодер) к блоку управления блок управления собран на МК STM32 и 2х BTS 7960 //тут меня сейчас закидают какашками, но я не подключал скрутку VCC+R_EN+L_EN к +5В - это дало эффект, что когда FFB=0 руль "абсолютно висит в воздухе" и вращается свободно без сопротивления, если же подать постоянное питание на эту скрутку, то обмотки мотора закорачиваются Н-мостами и не дают ему так свободно вращаться - еще раз повторюсь разница есть когда отсутвует выходный сигнал FFB// корпус блока так же напечатан на 3д принтере ] мощный блок питания был куплен у товарищей майнеров тока у него конечно с запасом... он сильно шумел вентилятором, и на скорую руку было сделано колхозное решение для уменьшения шума вентилятора, путем уменьшения его напряжения с 12 до 4 Вольт (сильно не смеяться) ] над коробкой с STM32 и BTS установил вентилятор чтобы вентилятор не работал постоянно, между ребер BTS вставил термостат KSD9700 с включением на 50 градусах ну и эта коробка установлена верхом на блоке питания спереди на коробке "clipping led" сзади разъем RJ45 для подключения энкодера и USB шнурок для подключения к ПК следом за коробкой поставил розетку РС-102 для подключения кабеля на мотор ну вроде пока все... если что забыл - спрашивайте замеры максимального момента (софт лок) дали усилие 10кг на рычаге 81мм (8,1 НМ) графики степ теста c баранкой (китай 320мм) и без: /руль после выключения FFB не останавливается т.к. как я говорил выше - мосты отключатся и он болтается несколько раз между софт локами/ график линейности усилия продолжение следует)
Всем привет, решил я создать отдельную тему под свой проект, перед началом я бы хотел выразить благодарность за технические консультации следующим пользователям портала: @Caravangoes @DarkGracius ну что, погнали! :) в поисках б/у коллекторного мотора постоянного тока типа MY1020 ну и "подобных", совершенно случайно наткнулся на Болгарский двигатель PIK-12 3/10-1 в состоянии почти нового, и после консультаций с @DarkGracius и изучении его темы на подобном моторе https://forum.simracing.su/topic/3830-narodnyy-directdrive-na-motorah-postoyannogo-toka/ был начат свой проект со своим видением прекрасного :) задняя крышка была просверлена для установки корпуса/держателя энкодера (omron 600 ppr) вал просверлен сверлом на 5мм, нарезана резьба м6, вкручена шпилька для соединения с муфтой энкодера, корпус/держатель энкодера напечатан на 3д принтере заменил штатные провода на мотор (использовал кабель КГхл 2х4мм) для крпеления мотора в гараже был найден "маленький" уголок 75х75х6 мм выпелен, просверлен и покрашен на вал мотора установлена 3д печатная быстросъемная муфта быстросъемная муфта представляет из себя разрезанное шлицевое соединение, сжимаемое зажимом-эксцентриком ну и для "+15 лошадей" мотор был обтянут пленкой под карбон на этот "настольная" часть была закончена от мотора идет жгут проводов (силовой кабель на мотор и экранированый кабель на энкодер) к блоку управления блок управления собран на МК STM32 и 2х BTS 7960 //тут меня сейчас закидают какашками, но я не подключал скрутку VCC+R_EN+L_EN к +5В - это дало эффект, что когда FFB=0 руль "абсолютно висит в воздухе" и вращается свободно без сопротивления, если же подать постоянное питание на эту скрутку, то обмотки мотора закорачиваются Н-мостами и не дают ему так свободно вращаться - еще раз повторюсь разница есть когда отсутвует выходный сигнал FFB// корпус блока так же напечатан на 3д принтере ] мощный блок питания был куплен у товарищей майнеров тока у него конечно с запасом... он сильно шумел вентилятором, и на скорую руку было сделано колхозное решение для уменьшения шума вентилятора, путем уменьшения его напряжения с 12 до 4 Вольт (сильно не смеяться) ] над коробкой с STM32 и BTS установил вентилятор чтобы вентилятор не работал постоянно, между ребер BTS вставил термостат KSD9700 с включением на 50 градусах ну и эта коробка установлена верхом на блоке питания спереди на коробке "clipping led" сзади разъем RJ45 для подключения энкодера и USB шнурок для подключения к ПК следом за коробкой поставил розетку РС-102 для подключения кабеля на мотор ну вроде пока все... если что забыл - спрашивайте замеры максимального момента (софт лок) дали усилие 10кг на рычаге 81мм (8,1 НМ) графики степ теста c баранкой (китай 320мм) и без: /руль после выключения FFB не останавливается т.к. как я говорил выше - мосты отключатся и он болтается несколько раз между софт локами/ график линейности усилия продолжение следует)
- 727 ответов
-
- 10
-
-
-
- mmos
- direct drive
- (и ещё 2 )
-
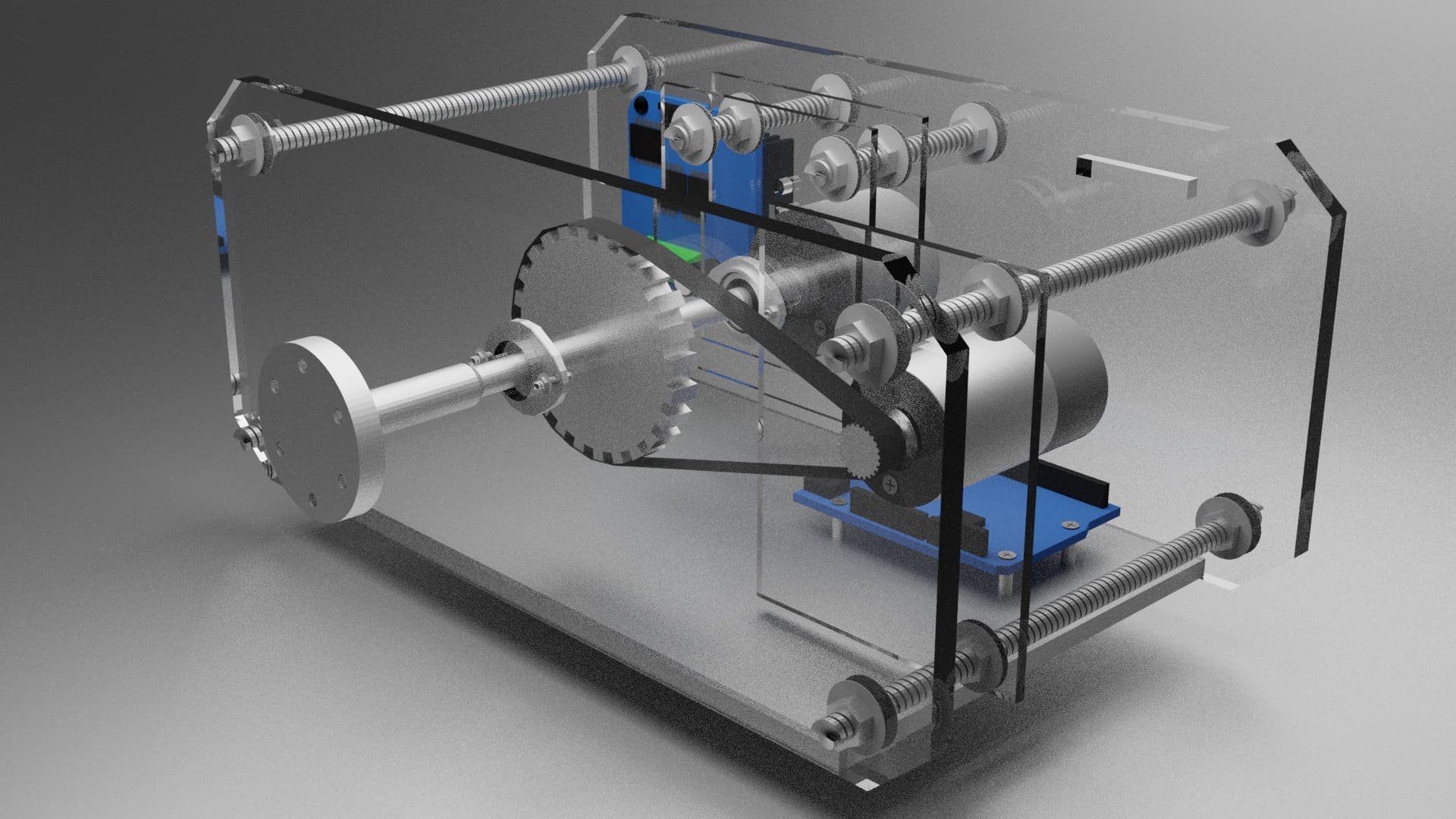
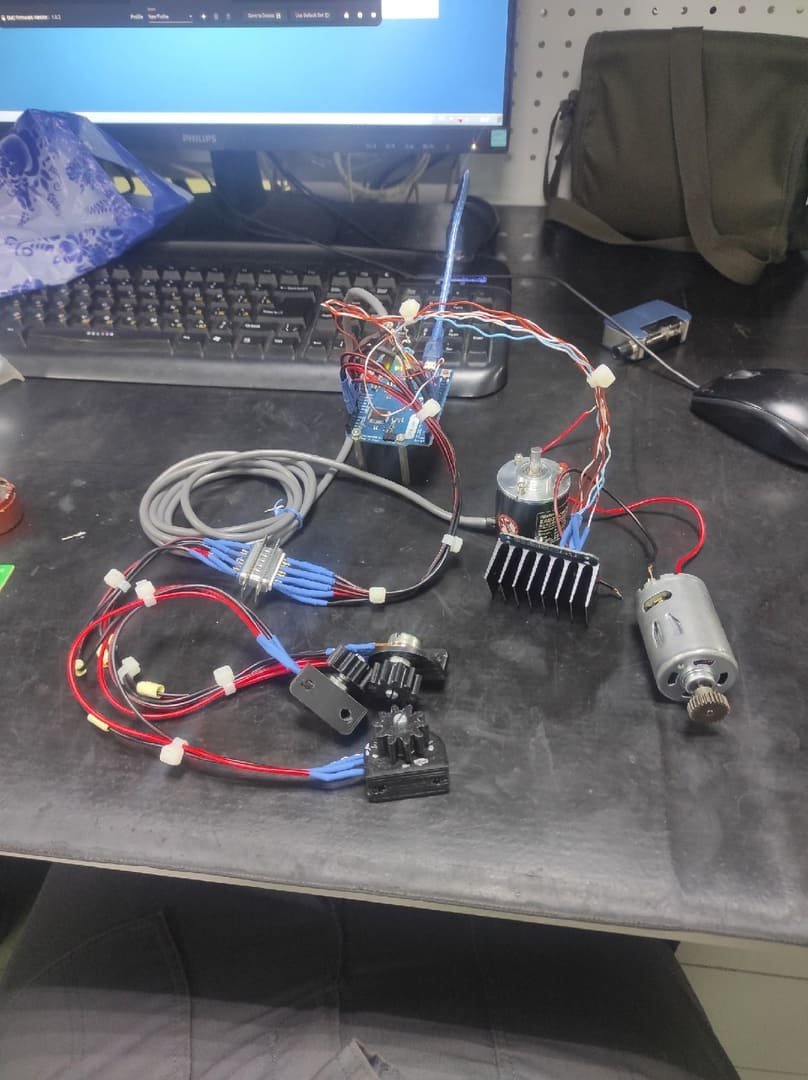
 Всем привет, больше года назад посетила меня мысль сконструировать свой руль с обратной отдачей, так как денег на хороший руль не было, а руки горели. По итогу конечно все это вышло в немаленькую сумму, за которую можно было купить подержанную базу именитых брендов, но сам интерес к самоделке только возрастал со временем. Изначально хотел собирать на базе Arduino leonardo, так как наткнулся на видео в ютубе от ebolzmagy, скачал его бесплатную обрезанную версию прошивки EMC для ардуино и заказал комплектующие со всеми вами известного китайского сайта. По приходу всех товаров сразу начал собирать электронную начинку и когда все заработало, списался с ним ( ebolzmagy), чтобы купить полную версию прошивки, но к тому времени он уже отказался от идеи собирать руль на базе ардуино, что и мне посоветовал. В ходе нашего общения выяснилось, что ардуино тупит из-за недостатка памяти в микропроцессоре и соответственно нужно искать другой вариант, этим вариантом была stm32f103c8t6, которая и была заказана на замену ардуино, но в последствии из-за моих кривых рук плата стала кирпичом и поэтому уже в третий раз пришлось заказывать новую плату, но почему-то наши китайские коллеги к тому моменту заломили на нее цену (stm32f103c8t6) и вообще было сложно найти именно эту плату, мой следующий выбор пал на плату, которая в итоге сейчас и стоит во главе всего механизма (stm32f407VET6). Ниже приложу 3д модель всей задумки изначально, но в дальнейшем она сильно изменилась. Изначальная конструкция менялась путем проб и ошибок, да и как сейчас я понимаю, главная проблема, которую я не решил, это то, что я установил двигатель и источник питания на 12в, но об этом чуть позже. Первая конструкция имела на борту двигатель RS775(12в, а до него еще был какой-то двигатель, не помню уже обозначение), энкодер Omron E6B2(Копия), зубчатые шкивы GT2 с ременной передачей 1:3(для такого движка понятно, что это соотношение не подходит, но хотелось быстрее испытать всю конструкцию в деле), драйвер BTS7960, источник питания 12В(15 ампер), Ардуино леонардо, корпус был сделан из оргстекла толщиной 10мм.(Был взят аквариум, рыбки уже давно играют в карты с Посейдоном, а аквариум пошел на "доброе" дело за ненадобностью) По итогу скажу так, когда этот суповой набор запустился, счастью не было придела, но все работало так, будто у меня в доме умирал тюлень, двигатель плакал и просил, чтобы его вернули обратно в шуруповерт, а источник питания хрюкал и плевался уходя в защиту от перегрузки при прохождении отметки стопора в прошивке, поэтому решено было что-то менять. Следующим этапом на замену ардуинки пришла stm32f103c8t6 и руль перестал тупить, но опять же из-за моих кривых рук, когда я проверял работоспособность сей конструкции, весело сгорел драйвер двигателя, да так, что батя хотел отказаться от сына (помню этот момент, когда матушка заходит в комнату, а я спиной стою к рулю и пытаюсь закрыть устроенный дома пожар и на вопрос, у тебя что-то горит? Делаю вопросительное лицо с идущим дымом из-за спины). В последствии был заказан новый драйвер, который стоит и по сей день. Также в процессе доработки моего Франкенштейна была угроблена плата stm32f103c8t6 и плачущий, но все еще находящийся в хорошем настроении (пришла зарплата), я понес китайским коллегам шекели в обмен на stm32f407VET6. Также были заказаны зубчатые шкивы с соотношение 1:6 и ремнем HTD3M, блок питания 12в (50ампер), двигатель RS895 12в (Моя главная ошибка, потому что мне кажется, что вместе с двигателем, они туда засунули смурфика с паяльником, иначе как объяснить, что эта падла греется так, что можно в холодную зиму за отопление не платить). Также были докуплены разные электронные компоненты, чтобы спаять и соорудить подобие приборной панели и обеспечить всему этому работу с помощью программы Simhub, а также были доработки с внешним видом и удобностью использования самой "конструкции", было сделано охлаждение на двигатель с использованием принудительного охлаждения (вентилятор сзади) и радитор с термопастой и хомутом для обвязки, но ощутимый эффект оказался лишь обманом(смурфик снова включет паяльник) и на нем можно сварить кофе любимой девушке. По итогу, граждане форумчане, прошу вашей помощи и сильно не судить человека начинающего свой путь в электронике. У меня к вам несколько вопросов: 1. Возможно ли переделать источник питания 12в на 24в и нужно ли это, может есть решение? 2. На какой двигатель лучше всю эту связку поставить?(Но так, как на 12в при этой той же силе фидбэка двигатель потребляет в 2 раза больше тока, я думаю, что скорее всего варианты с двигателем на 12в отпадут, хотя жду ваших предложений) 3. Купить логитек и идти играть в свой ETS2?( P.s. Никого не хотел оскорбить) Спасибо вам всем, кто дочитал до конца, прошу помощи и понимания)
Всем привет, больше года назад посетила меня мысль сконструировать свой руль с обратной отдачей, так как денег на хороший руль не было, а руки горели. По итогу конечно все это вышло в немаленькую сумму, за которую можно было купить подержанную базу именитых брендов, но сам интерес к самоделке только возрастал со временем. Изначально хотел собирать на базе Arduino leonardo, так как наткнулся на видео в ютубе от ebolzmagy, скачал его бесплатную обрезанную версию прошивки EMC для ардуино и заказал комплектующие со всеми вами известного китайского сайта. По приходу всех товаров сразу начал собирать электронную начинку и когда все заработало, списался с ним ( ebolzmagy), чтобы купить полную версию прошивки, но к тому времени он уже отказался от идеи собирать руль на базе ардуино, что и мне посоветовал. В ходе нашего общения выяснилось, что ардуино тупит из-за недостатка памяти в микропроцессоре и соответственно нужно искать другой вариант, этим вариантом была stm32f103c8t6, которая и была заказана на замену ардуино, но в последствии из-за моих кривых рук плата стала кирпичом и поэтому уже в третий раз пришлось заказывать новую плату, но почему-то наши китайские коллеги к тому моменту заломили на нее цену (stm32f103c8t6) и вообще было сложно найти именно эту плату, мой следующий выбор пал на плату, которая в итоге сейчас и стоит во главе всего механизма (stm32f407VET6). Ниже приложу 3д модель всей задумки изначально, но в дальнейшем она сильно изменилась. Изначальная конструкция менялась путем проб и ошибок, да и как сейчас я понимаю, главная проблема, которую я не решил, это то, что я установил двигатель и источник питания на 12в, но об этом чуть позже. Первая конструкция имела на борту двигатель RS775(12в, а до него еще был какой-то двигатель, не помню уже обозначение), энкодер Omron E6B2(Копия), зубчатые шкивы GT2 с ременной передачей 1:3(для такого движка понятно, что это соотношение не подходит, но хотелось быстрее испытать всю конструкцию в деле), драйвер BTS7960, источник питания 12В(15 ампер), Ардуино леонардо, корпус был сделан из оргстекла толщиной 10мм.(Был взят аквариум, рыбки уже давно играют в карты с Посейдоном, а аквариум пошел на "доброе" дело за ненадобностью) По итогу скажу так, когда этот суповой набор запустился, счастью не было придела, но все работало так, будто у меня в доме умирал тюлень, двигатель плакал и просил, чтобы его вернули обратно в шуруповерт, а источник питания хрюкал и плевался уходя в защиту от перегрузки при прохождении отметки стопора в прошивке, поэтому решено было что-то менять. Следующим этапом на замену ардуинки пришла stm32f103c8t6 и руль перестал тупить, но опять же из-за моих кривых рук, когда я проверял работоспособность сей конструкции, весело сгорел драйвер двигателя, да так, что батя хотел отказаться от сына (помню этот момент, когда матушка заходит в комнату, а я спиной стою к рулю и пытаюсь закрыть устроенный дома пожар и на вопрос, у тебя что-то горит? Делаю вопросительное лицо с идущим дымом из-за спины). В последствии был заказан новый драйвер, который стоит и по сей день. Также в процессе доработки моего Франкенштейна была угроблена плата stm32f103c8t6 и плачущий, но все еще находящийся в хорошем настроении (пришла зарплата), я понес китайским коллегам шекели в обмен на stm32f407VET6. Также были заказаны зубчатые шкивы с соотношение 1:6 и ремнем HTD3M, блок питания 12в (50ампер), двигатель RS895 12в (Моя главная ошибка, потому что мне кажется, что вместе с двигателем, они туда засунули смурфика с паяльником, иначе как объяснить, что эта падла греется так, что можно в холодную зиму за отопление не платить). Также были докуплены разные электронные компоненты, чтобы спаять и соорудить подобие приборной панели и обеспечить всему этому работу с помощью программы Simhub, а также были доработки с внешним видом и удобностью использования самой "конструкции", было сделано охлаждение на двигатель с использованием принудительного охлаждения (вентилятор сзади) и радитор с термопастой и хомутом для обвязки, но ощутимый эффект оказался лишь обманом(смурфик снова включет паяльник) и на нем можно сварить кофе любимой девушке. По итогу, граждане форумчане, прошу вашей помощи и сильно не судить человека начинающего свой путь в электронике. У меня к вам несколько вопросов: 1. Возможно ли переделать источник питания 12в на 24в и нужно ли это, может есть решение? 2. На какой двигатель лучше всю эту связку поставить?(Но так, как на 12в при этой той же силе фидбэка двигатель потребляет в 2 раза больше тока, я думаю, что скорее всего варианты с двигателем на 12в отпадут, хотя жду ваших предложений) 3. Купить логитек и идти играть в свой ETS2?( P.s. Никого не хотел оскорбить) Спасибо вам всем, кто дочитал до конца, прошу помощи и понимания)
-
 Всем доброго времени суток дорогие друзья. Это мой первый пост на форумах, так что не судите строго если есть какие то ошибки сразу извиняюсь, мог не заметить. Давайте начнем. Кому интересна моя предыстория то она будет под спойлером: (кому не охота все читать у меня на канале есть видео где я это все рассказываю, можете посмотреть послушать и поддержать в моих начинаниях ссылка на видео Fanatec Porsche 911 GT3 RS). Первым делом я купил промышленный экодер: (его пришлось разобрать что бы он встал в руль) С этим энкодером уже все заработало. Потом купил драйвер двигателя BTS7960 Ну и начал потихоньку приступать к монтажу этого всего в руль. Изначально все было вот так. этот руль уже ремонтировали из видимого это меняли провода от главной платы в плату руля, их я потом и буду использовать Сняв все платы я закрепил энкодер вот так, немного не красиво но работает. Провода закрепил так что при повороте руля в обе стороны они легко наматываются на вал энкодера и не рвутся. шестеренка на валу руля осталась от прошлых экспериментов с энкодером от принтера (этот колхоз можете посмотреть в моем видео). Вал энкодера сидит плотно и не проворачивается по крайней мере за месяц использования я такого не заметил. Т.к. этот руль уже кто то делал и внутри пластикового вала была алюминиевая трубка его кто то уже усиливал до меня и мне пришлось провода протягивать через термоусадку, выглядит это все вот так: Поставил на место штатное охлаждение двигателя: И нашел место и установил драйвер двигателя, т.к. мой двигатель не потребляет больше чем 24В/3А то радиатор я снял он тут не нужен, тем более все мы знаем что он там стоит практически для красоты и никакой термопасты и хорошего отвода тепла нет. Ну и плюс ко всему то над ним стоит штатный кулер который вытягивает весь горячий воздух наружу. Кстати плата STM32 встала как родная на место штатной платы. Теперь все подключаем, ставим ЮСБ хаб (который потом я убрал т.к. из за него лагало все) и можно собирать и тестить. P.S. Подключать педали нужно к 3v, мне из за этого пришлось покупать новую плату STM32 т.к. я походу подпалил немного АЦП на ней. А подключил я так по тому что до этого работал с ардуино и там все конектится к 5v. Кнопки на самом руле а так же вибромоторы 2шт. 7-ми сегментный дисплей а также добавил адресную LED ленту WS2812B для индикации оборотов двигателя, уже это все работает и недели 2 тестирую, сделал на ардуино про микро, если вам будет интересно чуть позже расскажу как все это делал. Если что то не понятно спрашивайте я мог что то упустить потому что много рассказывать. Если нужно видео с тестами могу сделать и выложить.
Всем доброго времени суток дорогие друзья. Это мой первый пост на форумах, так что не судите строго если есть какие то ошибки сразу извиняюсь, мог не заметить. Давайте начнем. Кому интересна моя предыстория то она будет под спойлером: (кому не охота все читать у меня на канале есть видео где я это все рассказываю, можете посмотреть послушать и поддержать в моих начинаниях ссылка на видео Fanatec Porsche 911 GT3 RS). Первым делом я купил промышленный экодер: (его пришлось разобрать что бы он встал в руль) С этим энкодером уже все заработало. Потом купил драйвер двигателя BTS7960 Ну и начал потихоньку приступать к монтажу этого всего в руль. Изначально все было вот так. этот руль уже ремонтировали из видимого это меняли провода от главной платы в плату руля, их я потом и буду использовать Сняв все платы я закрепил энкодер вот так, немного не красиво но работает. Провода закрепил так что при повороте руля в обе стороны они легко наматываются на вал энкодера и не рвутся. шестеренка на валу руля осталась от прошлых экспериментов с энкодером от принтера (этот колхоз можете посмотреть в моем видео). Вал энкодера сидит плотно и не проворачивается по крайней мере за месяц использования я такого не заметил. Т.к. этот руль уже кто то делал и внутри пластикового вала была алюминиевая трубка его кто то уже усиливал до меня и мне пришлось провода протягивать через термоусадку, выглядит это все вот так: Поставил на место штатное охлаждение двигателя: И нашел место и установил драйвер двигателя, т.к. мой двигатель не потребляет больше чем 24В/3А то радиатор я снял он тут не нужен, тем более все мы знаем что он там стоит практически для красоты и никакой термопасты и хорошего отвода тепла нет. Ну и плюс ко всему то над ним стоит штатный кулер который вытягивает весь горячий воздух наружу. Кстати плата STM32 встала как родная на место штатной платы. Теперь все подключаем, ставим ЮСБ хаб (который потом я убрал т.к. из за него лагало все) и можно собирать и тестить. P.S. Подключать педали нужно к 3v, мне из за этого пришлось покупать новую плату STM32 т.к. я походу подпалил немного АЦП на ней. А подключил я так по тому что до этого работал с ардуино и там все конектится к 5v. Кнопки на самом руле а так же вибромоторы 2шт. 7-ми сегментный дисплей а также добавил адресную LED ленту WS2812B для индикации оборотов двигателя, уже это все работает и недели 2 тестирую, сделал на ардуино про микро, если вам будет интересно чуть позже расскажу как все это делал. Если что то не понятно спрашивайте я мог что то упустить потому что много рассказывать. Если нужно видео с тестами могу сделать и выложить.