Beg
-
Постов
362 -
Зарегистрирован
-
Посещение
-
Победитель дней
28
9 Подписчиков







Посетители профиля
8859 просмотров профиля





Достижения Beg
")





-
Привет! на высоком СОФ и тем более на последнем круге начинаешь сильно волноваться и потеть и электризоваться, это ловят педали и зависают на этом эффекте собственно и основана работа детектора лжи :) вот попробуй

- 1 ответ
-
- 1
-
-
 катит, на stm32f103c8 встает EMC 1.0.5 так же есть версия 1.0.8 для f401 и f407
катит, на stm32f103c8 встает EMC 1.0.5 так же есть версия 1.0.8 для f401 и f407 -
МК: stm32f103c8 ПО: freejoy дешевле получается... promicro что то подорожали
-
@eugene_PSR https://disk.yandex.ru/d/RYqrgzUvBOJVkw срочно попробуй откалибровать мотор
-
В резьбе механизма ограничителя поворота точно ничего не застряло?
-
мне кажется что китайцы прочитали этот форум и сделали уже в подвале переделку)) я в отзыве на али оставлял ссылку на видео и получается на форум
-
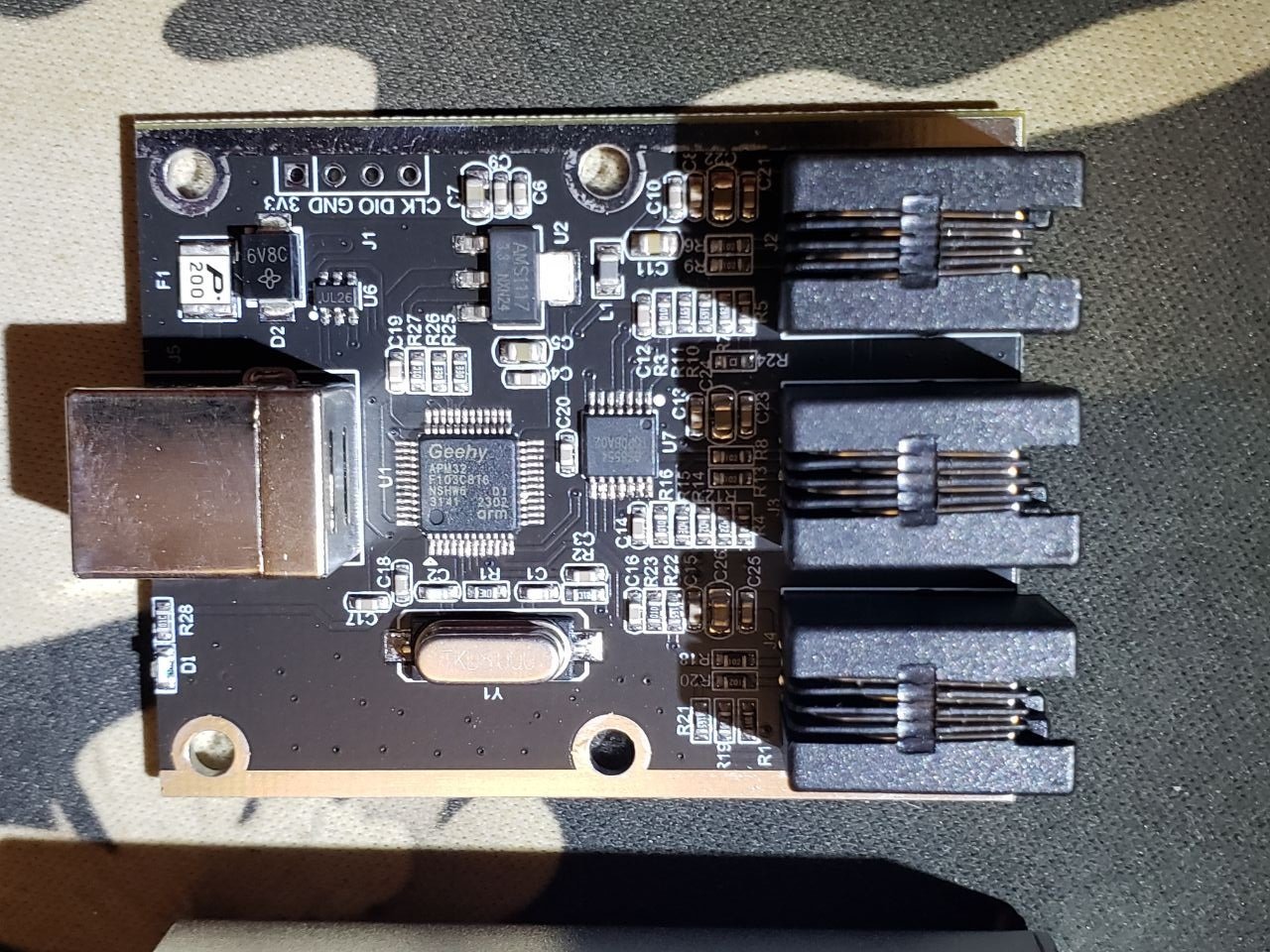
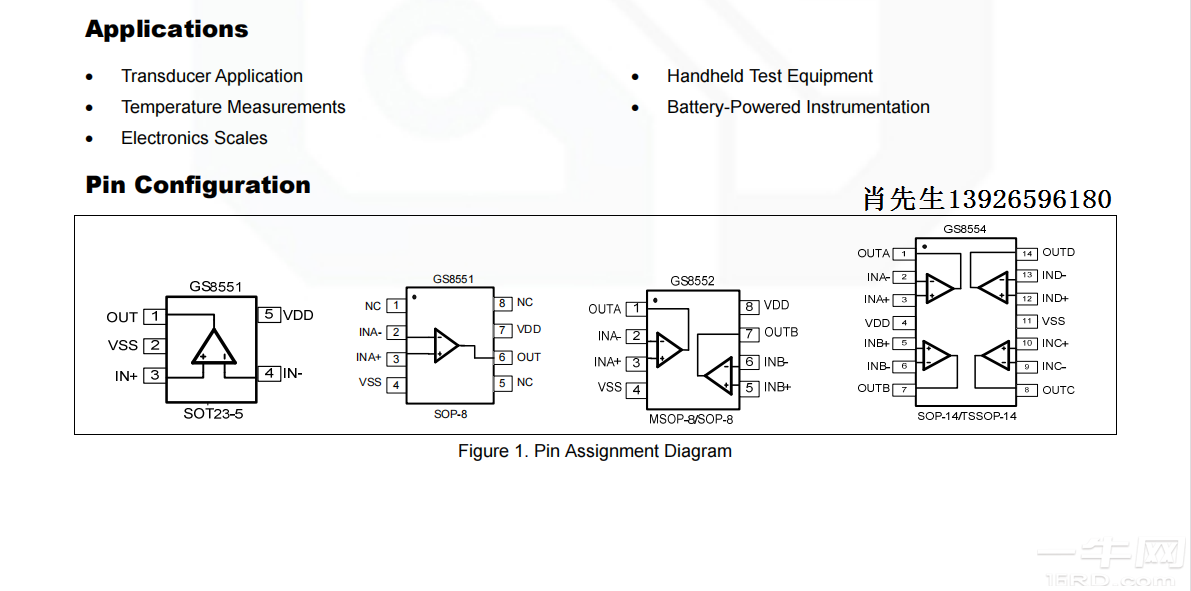
Китайцы провели работу над ошибками, измененения коснулись контролера 1. поменялся микроконтроллер - поставили китайский клон stm32f103c8 2. поменялась прошивка (установили FreeJoy) вместо 4х отдельных одноканальных операционных усилителей (для LC) gs8331 - поставили один 4х канальный GS8554 и зажмотили 4й запасной вход который ранее именовался ручником
-
на самодельном ДД
-
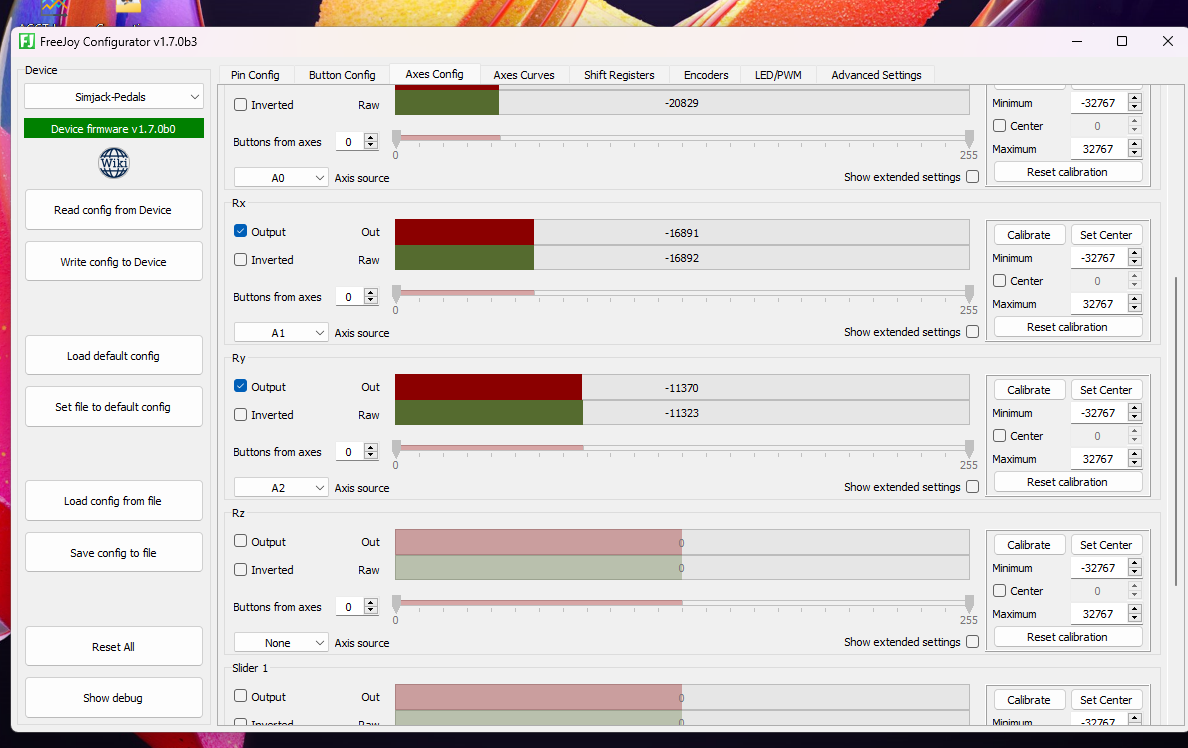
@DLmon питание самих усилителей от 5 вольт или переделано на 3.3 (убрано за стаб)? у меня уровни плавали в стоке, от изменения напряжения на USB
-
@iMoD а с самодельным БП и "самодельным" разъемом у вас во первых ничего не сгорит, а во вторых если сгорит то это будет гарантийный случай?
-
@yuri2 держи в курсе, покажешь потом что поставили тебе
-
@yuri2 аналог подобрать сможешь?
-
около выходов фаз на плате по 2 силовых мосфета на кажую фазу необходимо тестером прозвонить 2ю и 3ю ногу на КЗ у всех
-
@yuri2 там дальше плату снять понятно как винты все на виду p.s.: есть вопросы: 1. вал базы вращается сейчас легко, без ощутимых ступеней в обе стороны одинаково? 2. вал точно не выпал из базы? надо его перевокнуть 3. был случай когда вылетал предохранитель из платы, надо проверить его надежный контакт (он на плате сразу над разъемом питания)
-