Лидеры



Популярный контент
Показан контент с высокой репутацией 09/30/21 во всех областях
-
ЗАВЕЛ!!!!! Как ты и сказал решил проверить обвеску конвертера, все нормально было, прочитал весь даташит, перевел все что относится к конвертеру, решил протестить все выводы которые к нему относятся... Короче внезапно при постановке щупов на GND и 55 пин DRV8301 EN_BUCK он стартанул!!! Щупы убрал - выключился, поставил - опять стартанул, подержал секунд 30, и стало стабильно работать. При включении/выключении питания тоже стал стабильно стартовать. Вообще хз что было, но теперь и питание стартует и в винде сразу стал определяться. Завтра начну раму собирать. Спасибо за совет))3 балла
-
@Man_of_Nameless Принял, в личке - приглашение в дискорд.2 балла
-
Как вам такой дизайн?)
 2 балла
2 балла -
@Syava опять же, драйвер, который не воспроизводит, эти частоты как нужно. Это как раз его косяк. Опыт Piradik в пример. Такой же собственный пример, когда на опторазвязку расчитанаю на 4khz, подать 16кгц. Мосфеты, греются и потом сгорают. Мотор тоже не понятно как себя ведёт. Практически чисто вкл/выкл. Разберись с драйвером. Сделай всё как нужно для дд на MY1020. Народ на моторах от пылесосов делает и нет проблем) Если не выходит, делай передаточное, и дай ему хода. Будет гораздо лучше. Примеры тоже есть, с мотором, от беговой дорожки. С такими дд, Фанатек всё равно, не догоните. Вот тест крутящего MY1025. Если бы он лажал, то там не было бы таких показателей. 12v 33a. 30%gain 120g/m 12v 16khz 70%gain 350g/m 12v 16khz 100%gain 520g/m 12v 16khz И тест на линейность тоже бы показал, полный хлам. Но этого не происходит на нормальном бтс. Тут как бы такая ещё тема, что для мотора, частоты шим выше, лучше, в плане он якобы видит ток, как если бы просто подключен к источнику. Но и не следует забывать, что на DIY с реле вместо моста, и правильной раскачке мосфета на минусе по питанию, удалось получить в два раза лучше отклик посравнению даже с тем же БТС в одинаковых условиях. Можешь, собери его, там элементарно. Поэтому, однозначно сказать, что выше частота, хуже, нельзя. Тем более на непонятных драйверах.1 балл
-
@Milverton я собирал полку для шифтера и ручника, когда еще за столом сидел, кокпит бы не рискнул собрать из него, он легкий как перо и не прочный. Несерьезный выбор : )1 балл
-
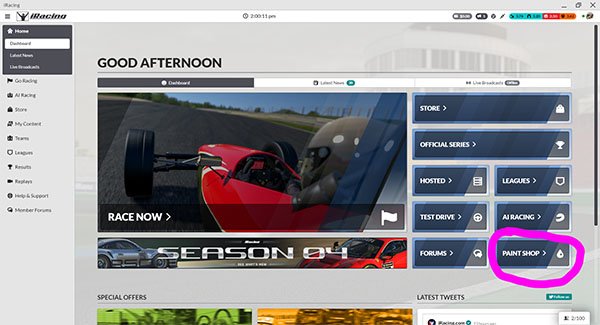
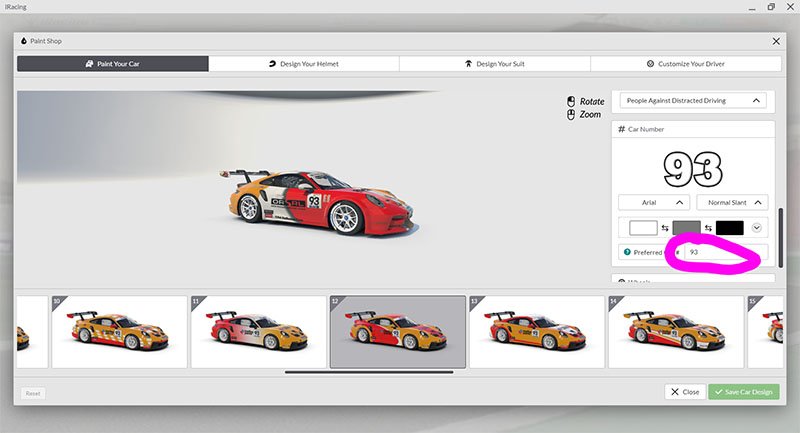
Напоминаю всем про пункт 6.3. Основного регламента. Чтоб его выполнить, в UI идем в PaintShop: Там находим наш Поршик (номера задаются для каждой машины индивидуально), колонку справа мотаем вниз до раздела Car Number и вписываем в поле Preferred Car# номер, который вы выбрали при регистрации в чемпионате. Это работает только в hosted-сессиях и практиках. На официальные заезды это не повлияет - там номера раздаются по рейтингу.
1 балл
-
Блин, точно, хочу обратно в A-Spec))))))))))))1 балл
-
Ну, Pot - чайник T - team. Команда чайников1 балл
-
Буду рад присоединиться и стать третьим, запрос отправлен!1 балл
-
@ANGO очень интересно, но ничего не понятно : ) Зачем эти сторонние приблуды ставить? Разве мало стандартных настроек, по моему сейчас в игре фидбэк и так шикарный.1 балл
-
Там умельцы вовсю переделывают блоки от обычного CSL Elite и ClubSport для получения 8Nm! Пойду завтра в магазин радиолюбителей, покупать переходники недостающие. Зашел в магазин к радиолюбителям! Показал что нужно! Итого: 453руб. За переходник (153р. материалы, +300р. работы). Штатный бп от ClubSport на фото ниже, как и бп на 8Nm.
1 балл