Лидеры




Популярный контент
Показан контент с высокой репутацией 03/30/20 во всех областях
-
Очень давно хотел, но всё никак не решался начать. А теперь держу в руках реплику руля одного из самых примечательных гоночных автомобилей своего времени - Maserati 250F. Знаю, возможно он должен быть темнее, а может быть в оригинале используется другая порода дерева. Но так как я обладаю достаточно ограниченными ресурсами, я нашёл себе отговорку: в то время экземпляры таких рулей могли порядочно отличаться друг от друга и пережив по несколько реставраций до сегодняшних дней, тяжело определить какая порода дерева или конфигурация отверстий/заклёпок исторически достоверна. Материалы, которые я использовал: белый ясень, тиковое масло, полиуретановый полуматовый лак, алюминий 5мм и самодельный логотип из аппликаций плёнки залитый смолой. Диаметр руля - 390мм. Вес - 720 грамм.7 баллов
-
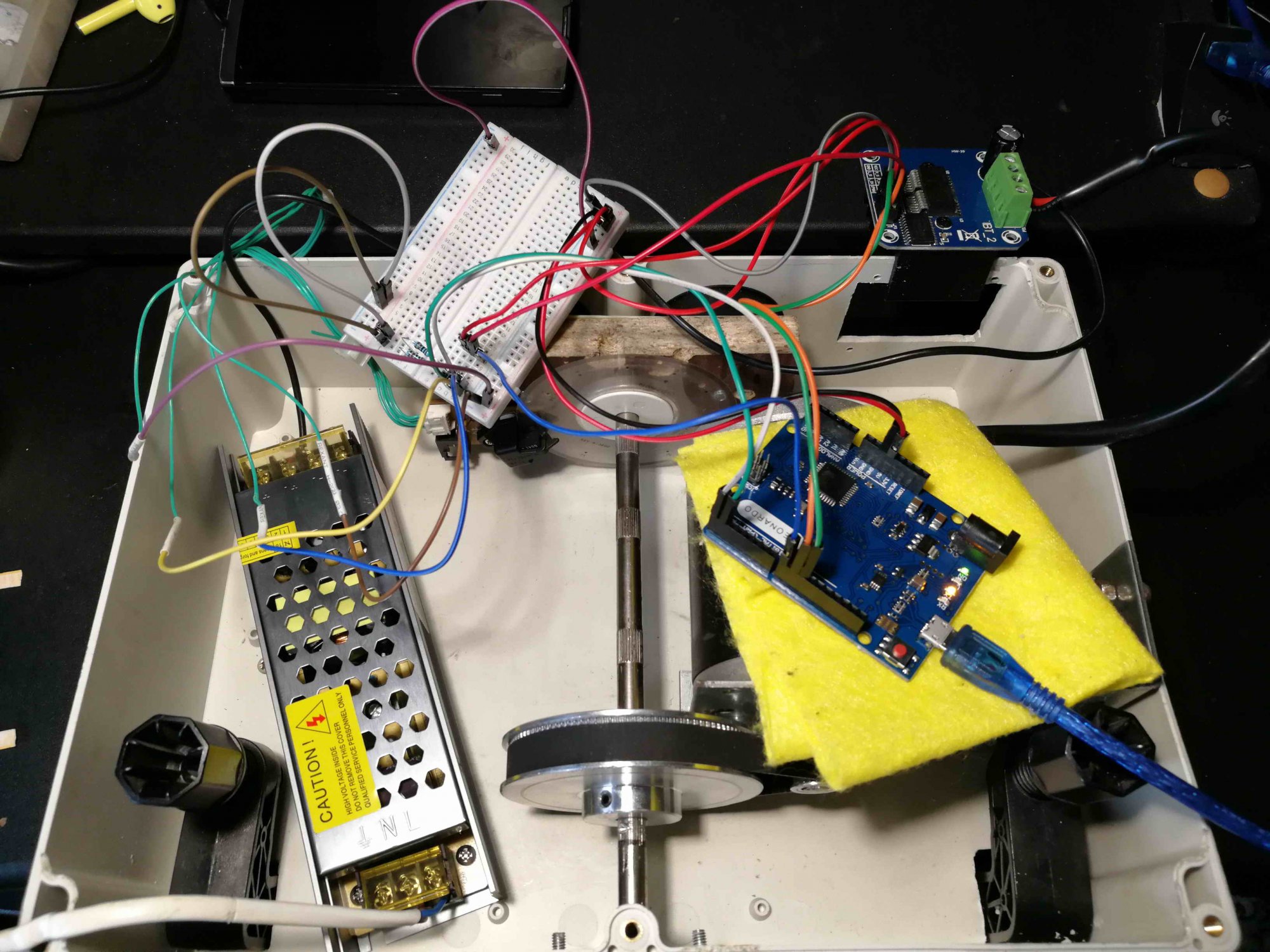
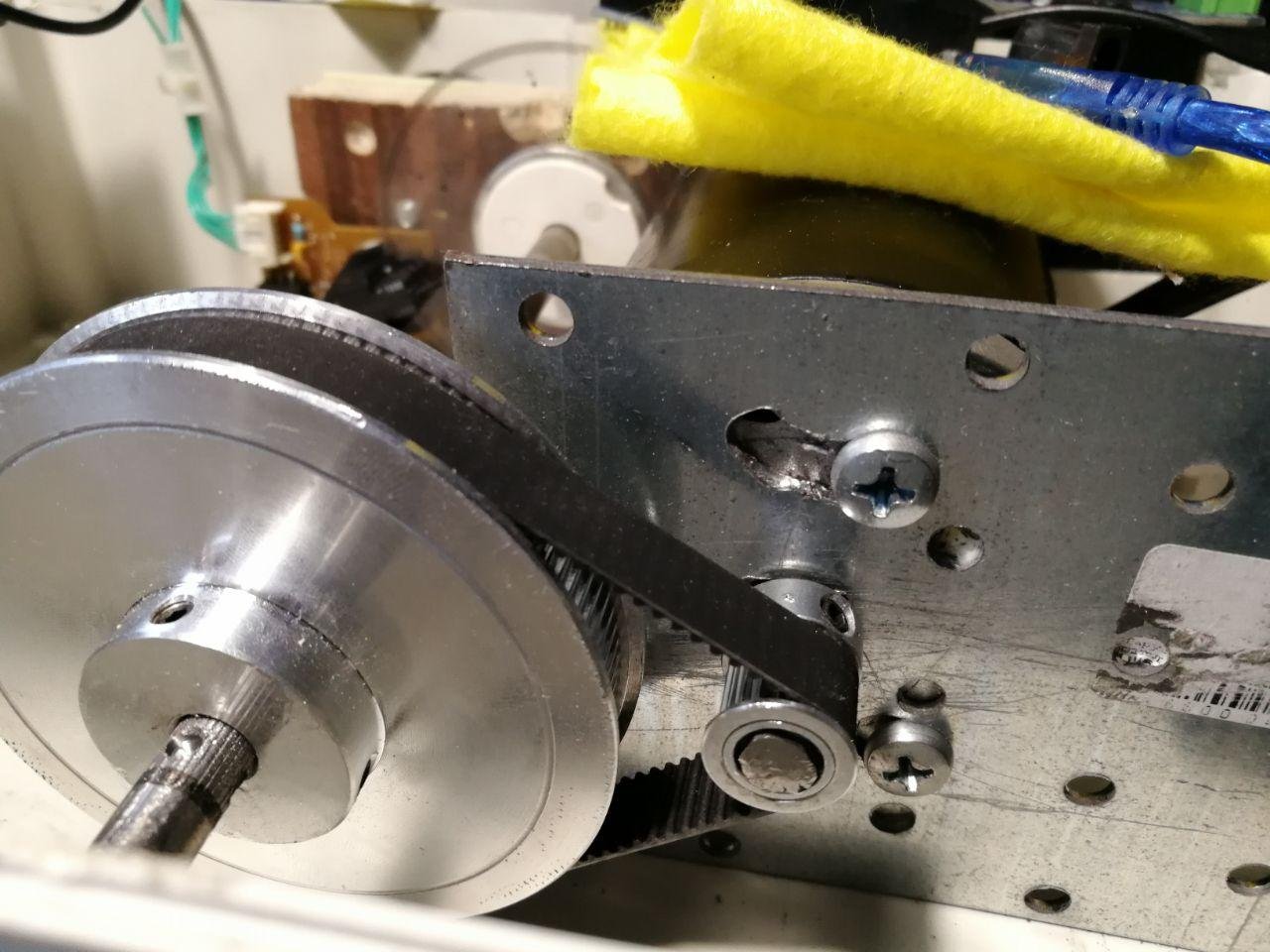
За основу взято прочитанное и увиденное на различных зарубежных форумах. В основном руководствовался видео от Caravangoes и AgaYuditra на youtube. Для сборки было приобретено: Пластиковый короб 290х210х100. Асинхронный коллекторный двигатель 24 вольта\100 ватт. Два алюминиевых шкива GT2 в комплекте с ремнём. Передаточное отношение 1:8. Arduino Leonardo, BTS7960b и макетная плата на липучке. Всё перечисленное от завода WAVGAT. Вал 8 мм. Достал из древнего принтера HP Jet 2000. Энкодер оптический + диск к нему. Из того же древнего принтера. Струбцины пластиковые. Извлёк из никому не нужного Logitech Wingman Formula. Рулевое колесо снял с того же Wingman. Импульсный блок питания 24 вольта\4.2 ампера. Модель APS-100LN-24BM. 120 проводков с коннекторами для плат прототипирования. Заглушка от ручки замка двери Запорожца для "переднего" подшипника в корпусе базы. Первоначально для теста использовалась прошивка Ai Wave 2016. Плата исправно получала данные с энкодера, однако версия прошивки платы в момент запуска утилиты определялась через раз, либо не определялась вовсе. Дополнительные неудобства создавал мотор. При значении Main Gain 100% мотор невозможно сдвинуть с места (логично, мотор 100 ваттный). При уменьшении Main Gain появляется возможность провернуть его ровно настолько, насколько я снизил уровень Main Gain. При снижении до 80% и ниже руль становился "пустым" в середине, однако при установке Main Gain 100% руль снова возвращался в центр. Изрядно намучившись с утилитой Ai Wave, переставшей определять версию прошивки (теперь уже совсем), но по прежнему получавшей данные с энкодера, я решил от неё отказаться в пользу ПО от EbolzMagy. Вся дальнейшая работа планируется только с ней. Утилита установлена, прошивка залита в плату. Arduino Leonardo определяется как устройство ввода "EMC" с обилием кнопок (гипотетически подключенных) и осью руля. И вот теперь самое странное. Подключение энкодера от принтера я изменил согласно приложенной WIRING схеме (содержится в архиве от автора ПО). Я вижу что плата никакой информации от энкодера не получает, однако он запитан, пять вольт на него приходит, свечение в оптике видно невооружённым глазом. Мотор так же молчит. Вращение вала не встречает никакого сопротивления, показаний в утилите EMC Utility Lite нет. На текущий момент подключение выглядит так:
 1 балл
1 балл -
просто шедеврально! В очередной раз снимаю шляпу! Работа очень красивая!1 балл
-
Если не дрифтить не гремит. Видио полно. ) Нет, жёсткости и прочностью там железобетонно и ещё с запасом. ))) Но пусть кажется, я не против)1 балл
-
Ну это спорное утверждение) В курсе что ты переходишь на T300, ну только пусть народ с толку не сбивается, про DIY из говна веток базы, что их прям все разносит большим рулём)1 балл
-
не превышай скорость 60 в момент за несколько сек перед стартом, если превысишь, получишь штраф. а кто обгоняет, на них забей, это на их совести.1 балл
-
Кресло в крайнем случае можно взять автомобильное.1 балл
-
Готовые есть, можно их в параллель соединять, тогда потянут. А вот с ценой тут не факт что самому дешевле. Тут только на микросхемах можно разориться. Ничего. Пройдёт. У меня так аудиофилия прошла. Лет так за 20.xD1 балл