Лидеры



Популярный контент
Показан контент с высокой репутацией 03/13/21 во всех областях
-
Закончил наконец ручной тормоз. Используется магниторезистор. Эту тему создал для обсуждения. Имеется настройка как начального угла так и конечного, а также изменение положения ручки. Макс градус отклонения примерно 45. Проект на грабкад1 балл
-
Совет. Колодку, лучше посадить на монтажную плату, и провода паять, что-то вроде того, как на примере. Если просто к самой колодке, то это не совсем надёжно, и не удобно. Плюс контакты имеют свойства отваливаться. И будет лучше если отдельно будет выведены плюс и минус с отдельной площадкой в виде зачищенного куска провода по монтажной плате, от +5v. Удобно вешать питание датчиков итд таким образом. Из той же оперы по бтс.1 балл
-
Неужели меня одного от этого дешёвого «жаргонизма» корёжит? : )1 балл
-
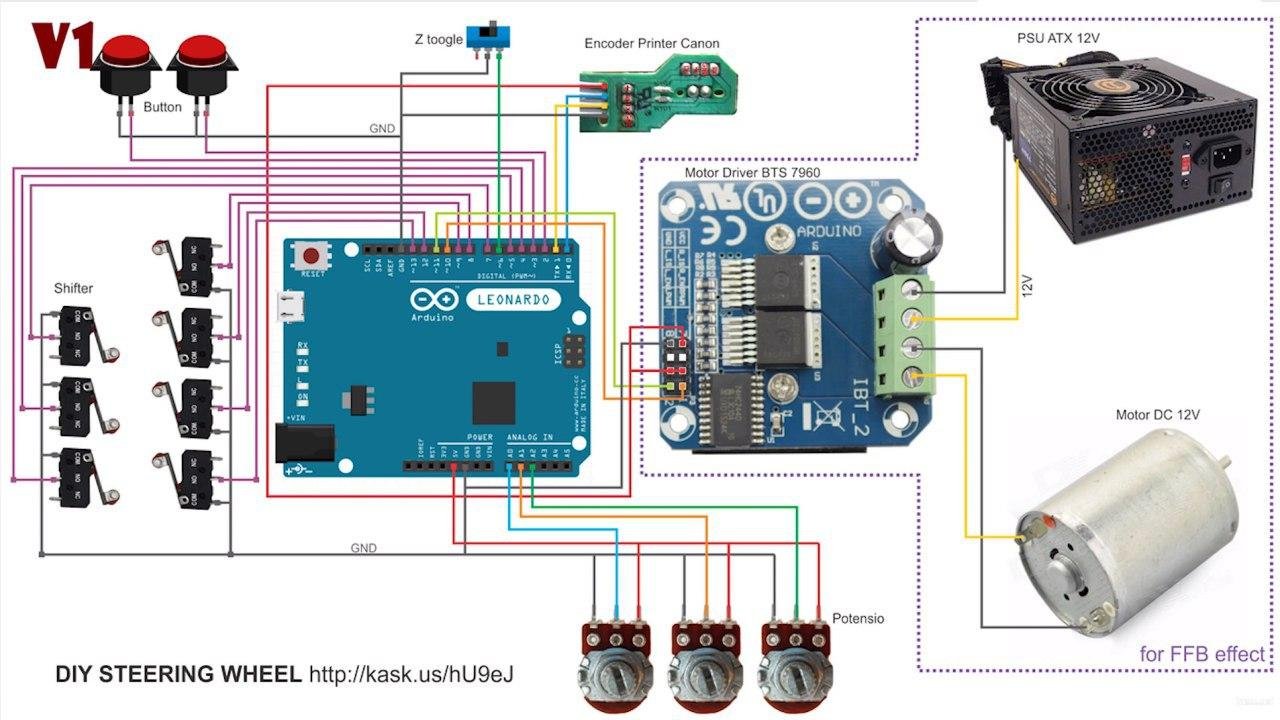
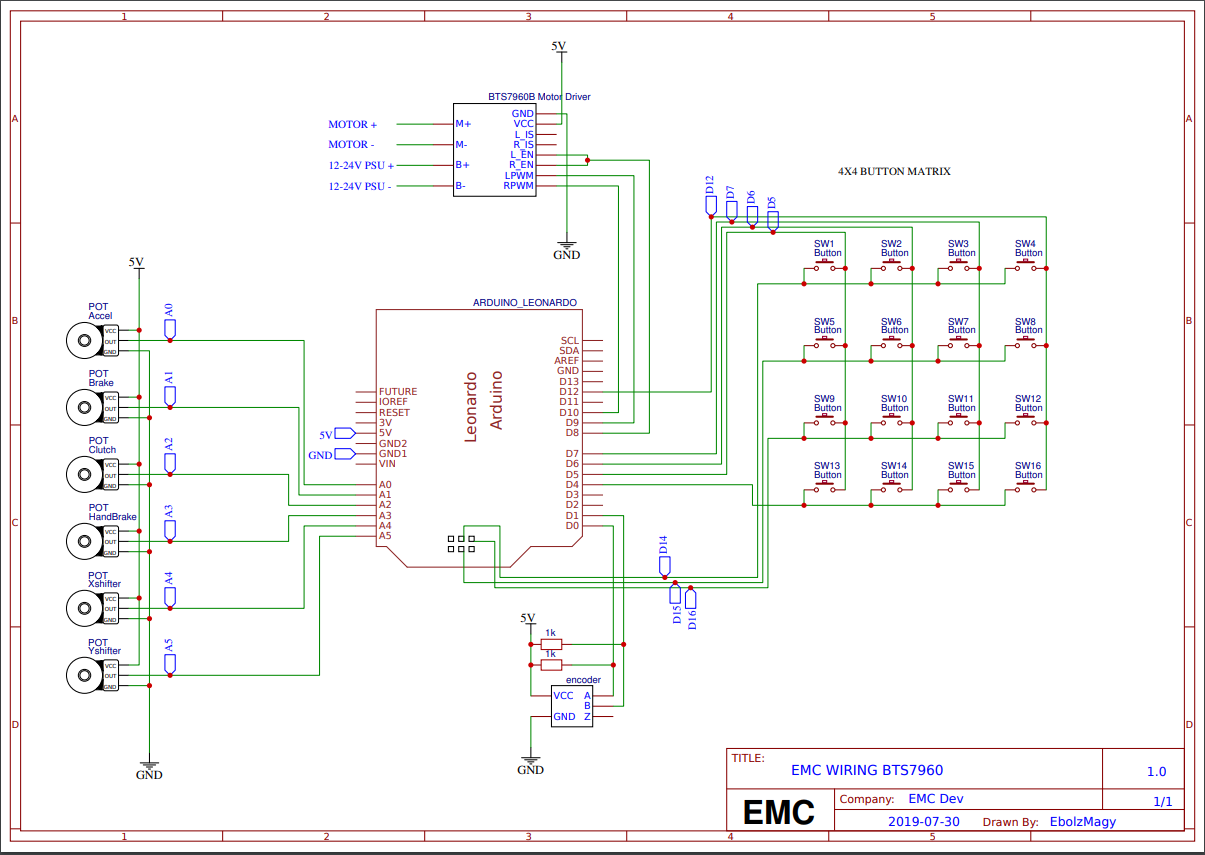
@Sieben отличие в них и заключается. В резисторах. Хотя я пробовал и с ними и без них. На схеме для WheelConfig их не было, энкодер принтера подключался без них к контактам 0 и 1. В принципе логично, ибо на самом энкодере они и так есть с завода. Ну и BTS7960b был подключен пинами VCC, L_EN, R_EN к линии 5V, а у EbolzMagy L_EN, R_EN подключаются к 8 контакту на Arduino Leonardo. Я попробовал и так и эдак. Отличия на скриншотах:
 1 балл
1 балл