Лидеры




Популярный контент
Показан контент с высокой репутацией 12/10/19 во всех областях
-
Results&Stats > My Series Results. Можно задать период по датам, можно по сезонам и нажать search1 балл
-
Допустим бак вмещает всего 40 литров, а до финиша необходимо 50 литров. Если ушатаю авто, то придется ехать чиниться, а потом еще и дозаправляться, что грустно : ) А если в бак влезут все 50 литров, то можно дозаправиться, починиться и ехать до финиша аккуратно.1 балл
-
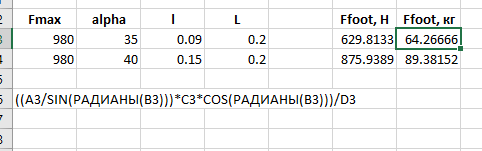
Сел рисовать силы, третий раз посчитал все, третий раз разный результат, ну что за фигня! )) Делал вот по такому расчету, если видите, что что-то не так - пишите, м.б. коллективными усилиями докопаемся до истины ) Поехали Разрисуем все что нужно для расчета Здесь у нас Ffoot - сила, приложенная ногой к площадке педали. Ее ищем Flev - сила, получающаяся после рычагов L, L1, L2 Flc - сила, действующая на датчик. Действует под углом a1 к Flev. К самому датчику также действует под углом a1 Fmax - вертикальная составляющая Flc Для простоты расчетов сделаем допущение, что педаль неподвижна (например установлены максимально жесткие пружины), иначе у нас все углы и рычаги будут динамически меняться при нажатии и расчет будет несколько сложнее )) 1. На площадку педали давит нога симрейсера с силой Ffoot. Нужно найти такую максимальную силу Ffoot, при которой 100 кг-вый датчик все еще не сломается. Подразумевается, что симрейсер достаточно суров и может давить с любой силой Полная длина педали - 20см, длина рычага L1 - 9см, длина рычага L2 - 14см Отсюда получаем, что в месте крепления штока после системы рычагов получаем силу Flev, выражая через нее Ffoot, имеем Ffoot=(Flev*L1)/L Для простоты считаем, что Ffoot перпендикулярна педали 2. Поскольку направление силы Flev не параллельно Flc (которая давит на датчик), а под углом a1, то Flev=Flc*cos(a1) Здесь для простоты принимаем, что Flev направлена параллельно датчику load cell 3. Flc в свою очередь не перпендикулярна датчику, поэтому нам нужно найти только вертикальную составляющую этой силы Fmax (так назвал только для обозначения макс силы, которую выдержит датчик) Flc=Fmax/sin(a1) 4. Подставляем все в п.1, получаем целевую формулу Ffoot=(Flev*L1)/L= (Flc*cos(a1)*L1)/L = ((Fmax/sin(a1))*cos(a1)*L1)/L Углы прикинул конечно не точно, примерно получаются 35 и 40 гр для одного и другого положения. В спеках по датчикам емкость указывается в кг, соответственно 100кг датчика будет 980Н, результат также получим в Ньютонах, для кг (чтобы сравнивать с другими) делим на 9,8 В итоге у меня получилось 64кг для нижнего положения и 89кг для верхнего ) Да уж, с прикинутыми вначале цифрами мало общего ))
 1 балл
1 балл -
А топикстартер всего лишь спросил про крепление )))1 балл
-
У нас предусмотрена "бесплатная" починка0 баллов
.jpeg.c8ee7695fe5686af0f9077d7a6bc23ed.jpeg)