Лидеры



Популярный контент
Показан контент с высокой репутацией 09/29/20 во всех областях
-
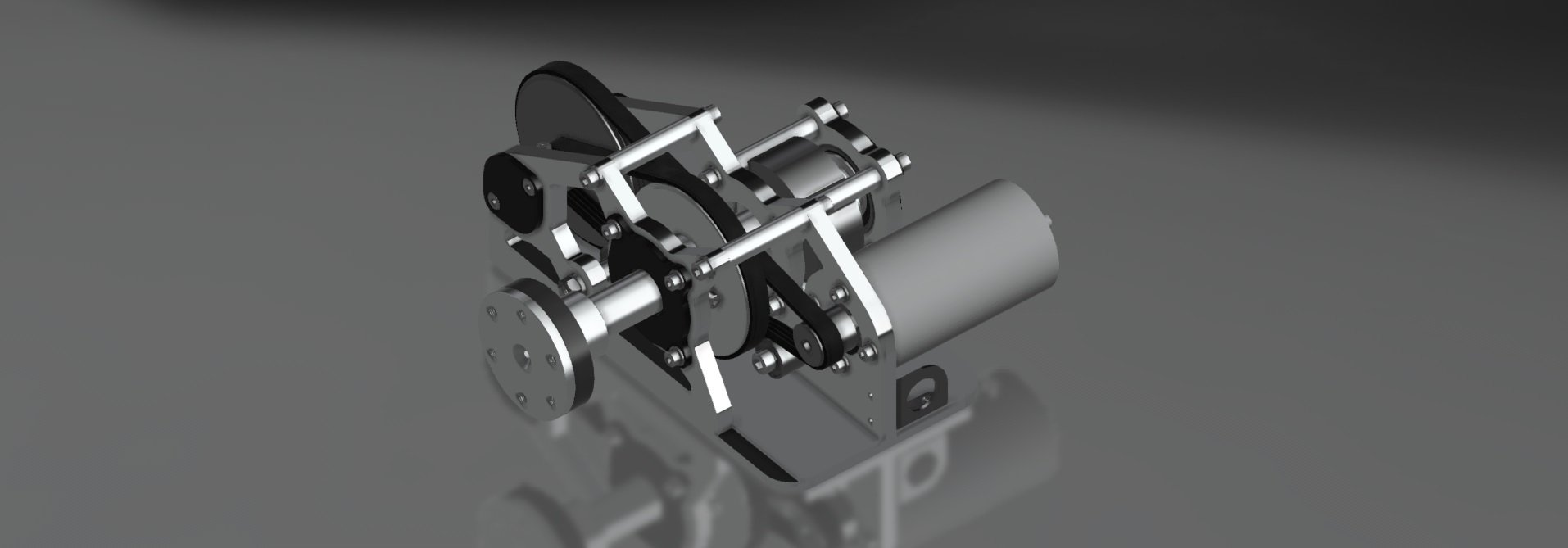
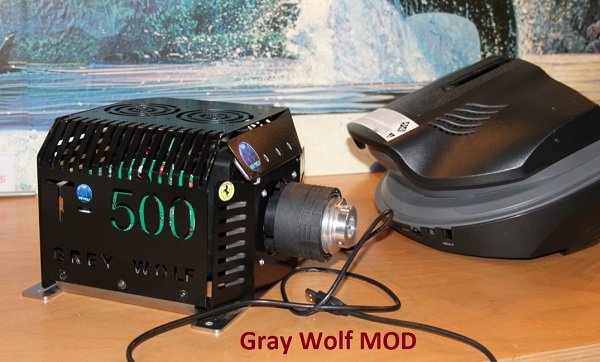
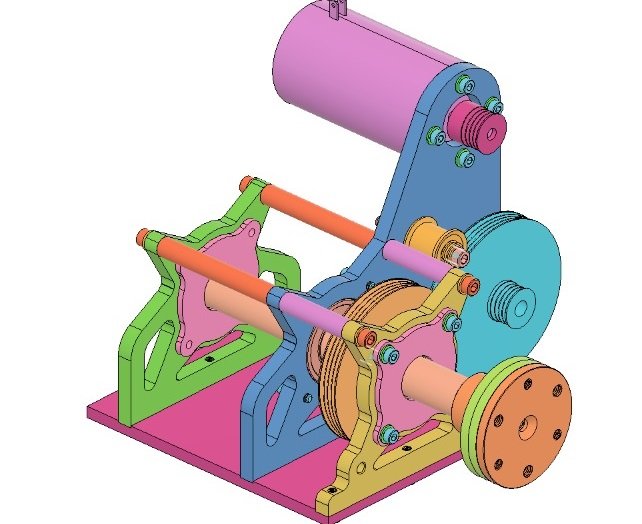
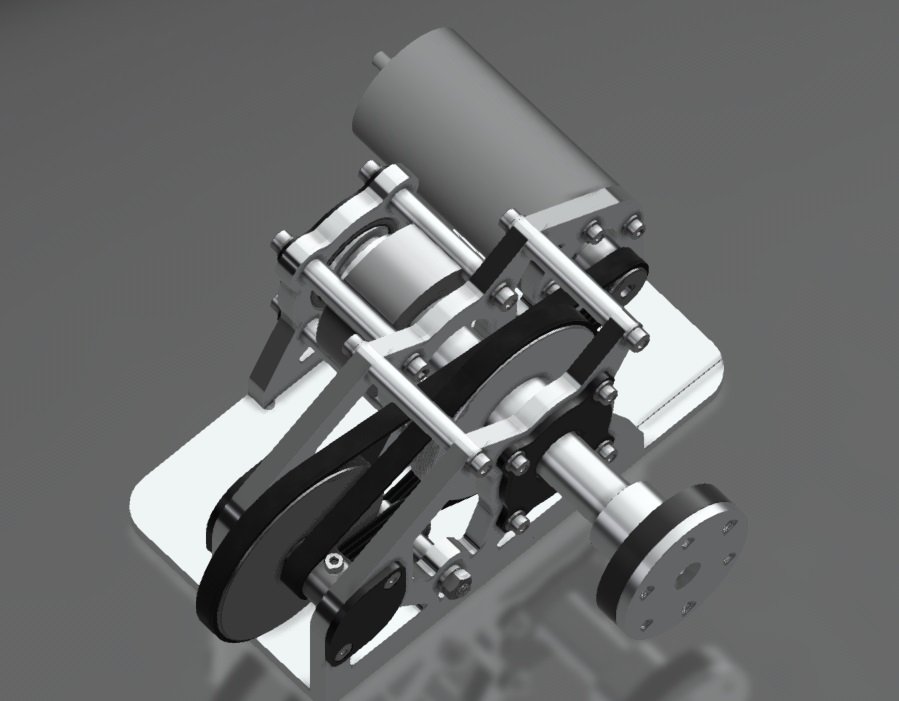
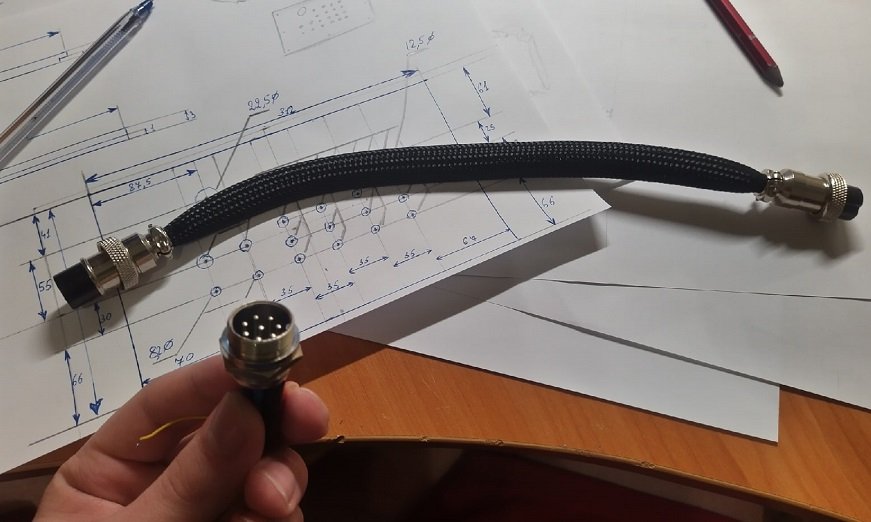
Доброго дня! Лучшего названия для темы не придумал)) Внимательно следил за проектом рулевой базы от Caravangoes. Жутко впечатлен до сих пор! Безумно серьезная работа с такой эстетикой, что просто вне конкуренции (лично для меня). И до недавнего времени я даже мысли не допускал пытаться сделать что-либо даже супер отдалённо похожее, ибо кажется всё это сложным и недостижимым. Но попался в руки рассыпающийся Т500RS и из желания его перебрать плавно перенесся к проекту, который на данный момент готов примерно на половину. Итак. Разобрав Т500RS я был поражен инженерным идиотизмом. Обнаружил множество сколов пластика, раздолбанный ограничитель поворотов, вал со сколом из какого-то не самого приятного сплава и зубчатые ремни передачи. Для тех, кто не знает-Т500RS внутри весьма объёмного пластикового "обтекателя" представляет собой не слишком большую черную пластиковую коробочку с двумя металлическими пластинами (одна - основание с креплением струбцины, вторая - усиление лицевой части). Внутри находится собственно привод, двигатель, вал и прочие подробности. Сперва хотел просто переделать корпус для этой "коробочки" в стиле модов GREY WOLF, но по итогу решился на более радикальные изменения. В первую очередь, очень хотелось заменить зубчатые ремни на поликлиновые. Во-первых, они точно тише. Во-вторых, есть ощущение зубчастости (я в тех. части не силен, оперирую в основном домыслами и предположениями) и мне вот кажется, что это именно из-за зубчатых ремней, что как минимум логично звучит. В Фанатеке клабспорт стоят клиновые, 4pj, кажется, так что подумал, что взяв такие-же не прогадаю. Хотя задавался вопросом-почему сам Caravangoes использовал зубчатый. Возможно-мощности передаются выше и это необходимо, дабы избежать проскальзываний.. Так же хотелось максимальной монолитности конструкции. Что бы не было никаких люфтов, скрипов и прочего. От сюда следует использование металла в конструкции. Ну и в последнюю очередь подумал об эргономике. Никогда не разбирался ни в устройстве микросхем, ни в платах, ни в пайке и прочем-поэтому подумал, что всю эту конетель было бы удобно засунуть нахрен в отдельную "коробочку" и как нибудь потом разобраться. Со временем решил, что не плохая мысль построить всю логику будущих устройств следующим образом: -главным модулем идёт баттон бокс внутри располагаю все платы, блок питания. От него к двигателю и энкодеру будет идти своя "коса", так же разъем для провода питания и usb. Если теоретически делать проект не на базе Т500 а с нуля, можно будет создать большее количество разъемов под любую периферию. И кнопки будут не лишними, баттон бокс же вещь хорошая) А рулевую базу можно не перегружать проводами, платами и разъемами. -присоединяемым к нему идет модуль рулевой базы двигатель и энкодер соеденяются с разъмом на 9пин. Всё это через провод подключается к баттон боксу. Больше ни-ка-ких компонентов электронных на базе нет. по разъему конечно я допускаю собственный идиотизм, так как провода очень разной площади сечения. По хорошему это всё должно быть соединено иначе, но я решил рискнуть сделать так, всё равно для себя это делаю ну и проект можно сказать черновой) Приступил к созданию модели будущей базы. Мой уровень владения 3д редакторами-google скетч ап на твердую троечку. И тут я хочу просто 10005000 раз снять шляпу перед господином @Caravangoes . Помимо вдохновения, человек подарил ещё и свои наработки в открытом виде. Я не стал пренебрегать. Не долго думая, скачал 3д модель в формате под скетчап, удалил все не нужные мне узлы, затем наделал скриншотов с разных ракурсов и прямо в пейнте подрисовал всё то, что мне примерно нужно было создать по итогу. Отправившись к знакомому со всем этим делом через неделю получил переработанную версию. После определённых правок получил таки результат, которым более чем доволен. Было сохранено родное передаточное число 1\16 Был сохранен ограничитель поворотов (выполнили по аналогии с фанатековским, используя распорки в качестве направляющих). Оставили без изменений посадочное место под рулевое колесо (в планах сделать свой квик релиз), ну и очевидно, что конструкция именно ИЗМЕНЕНА, не создана с нуля. За такую возможность ещё раз сердечно благодарю @Caravangoes Для охлаждения будет использоваться родной радиатор (новый купить не удалось, специфический размер, а делать с нуля не особо захотелось), так же кажется, что теплоотводом будет служить и сам корпус руля, так как весьма большая площадь контакта у двигателя и центральной плиты. Из чего в итоге состоит база: Ремни 4PJ (356 и 483) 2 подшипника 16004 2 подшипника 628 4 подшипника 606 2RS или ZZ - без разницы, насколько я понял, так что какие нашел в своем городе, такие и купил :) а так же м5х20 - 15 шт. + шайбы м4х14 - 15 шт. + шайбы м6х40 - 2 шт. (с шайбами и гайками) - для натяжителей м4х12 - 15 шт. (потайные) - для крепления плит между собой м3х6 - 4 шт. (круглые) - для кронштейна разъема Указал всё с запасом) Так же нужен синий фиксатор резьбы. А может и красный.. Для токарных работ: (из Д16 или ближайших по свойствам сплавов-аналогов) Вал промежуточного шкива Вал рулевого колеса Шкив ведомый Шкив ведущий Шкив промежуточный распорка 1 (2шт) распорка 2 (4шт) Фланец крепления руля Шайба на фланец руля втулка натяжителя 1 втулка натяжителя 2 Для фрезерных работ: (АБС пластик или любой листовой металл подходящей толщины) Крышка подшипника 1 (2шт) Крышка подшипника 2 (2шт) (из АМГ 8) Задняя стенка - с запрессовкой подшипника (1шт) Передняя стенка - с запрессовкой подшипников (2шт) Средняя стенка - с запрессовкой подшипника (1шт) (из АМГ 6) Основанее Ну и после сборка... Я на стадии изготовления деталей :) По "паяльным работам".. Отпаял все тактовые кнопки для последующего соединения этих мест с кнопками с алиэкспресс, удлинил провода энкодера, питания, двигателя, светодиодов. Укоротил провода от блока питания и USB (переделав на "маму" для более удобного подключения. Припаял разъемы 9 пин "папа" со стороны энкодера двигателя (то есть со стороны базы рулевой) и аналогичный со стороны баттон бокса, спаял провод для их соединения. Паял, к слову, впервые в жизни, так что уверен, многое придётся переделывать.. ЧТО КАСАЕТСЯ БАТТОН БОКСА... Его чертеж решил сделать сам, пока в процессе. Но коробка-она и в Африке коробка) Планирую сделать стандартный бокс из аллюминия 3 и 6мм. с пазами. Внутрь распечатать на 3д принтере пластиковую вставку с пазами и посадочными местами под все платы, блоки, провода и прочую мешуру, что бы всё располагалось надежно и не болталось. Кнопки взяты с кнопок на руле, статичных лепестков и кнопках с самой базы. Светодиод-так же с базы, второй светодиод-с блока питания. Добавил выключатель (разомкнув цепь по "плюсу" от разъема питания базы. Остаются вопросы по заземлению (ещё не успел вникнуть что это такое и как правильно делается-можно ли всю "землю" кинуть на один корпус) ну и по сути дело только за часами работы, на которую по мере возможностей выкраиваю время) Короче на данный момент мой руль представляет собой валяющиеся провода, микросхемки, двигатель, набор ремней, метизов , а так же полные штаны энтузиазма и парочку чертежей.. Очень надеюсь домучать этот проект до конца октября. Очень интересно замерить изменения в работе и посравнивать с другими базами.. Ну а поделится "недостроем" решил, дабы получить хоть какой-нибудь фидбек, а то потихоньку угасать начинает желание всем этим заниматься из-за кучи бытовых факторов.. Думаю у многих тут так) Очень признателен за внимание!
 2 балла
2 балла -
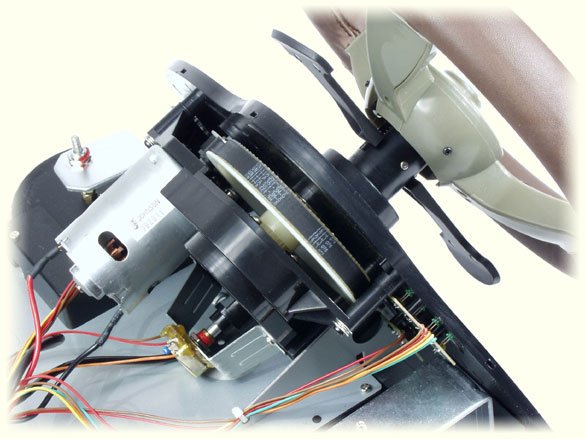
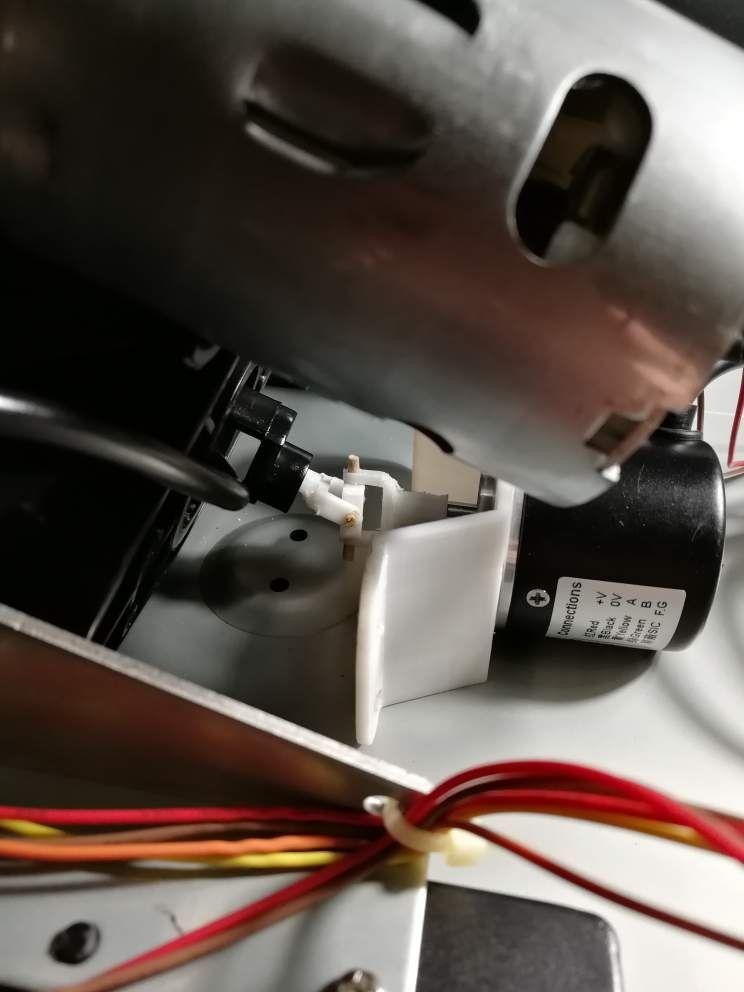
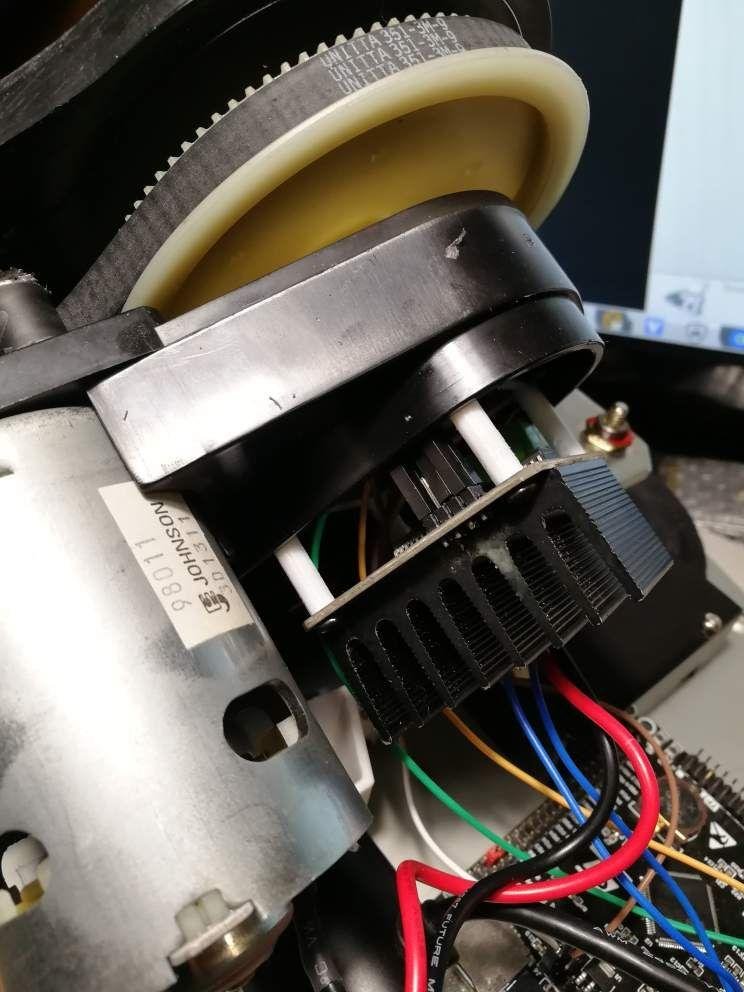
Чрезвычайно редкая игрушка. В годы выпуска был мало распространён на территории СНГ. Найти такой сегодня очень трудно. Оплётка мягкий кожзам, станина из толстого металла, металлические струбцины с удобными колёсиками и клёвые подрулевые лепестки. Ну и самое главное, собственно из-за чего я его купил - ременной привод! Да, у игрушки, разработанной ещё "до нашей эры" были ремни. Недостатков два: потенциометр в качестве датчика положения вала, совместимость драйверов только с древними системами (Windows 98, Windows ME). Продали мне его полностью рабочим, но проверять это я всё равно не стал. Заводская логика не нужна. Я сразу её выкрутил и выбросил)) Вместе с потенциометром. Настал черёд создания крепления для оптического энкодера, платы BTS7960 и ардуино с прошивкой EMC Lite. Тут меня ждало разочарование. Ардуино на этой прошивке не работает с драйвером BTS7960. На всякий случай проверил драйвер на плате STM, работает. Ну что ж, это уже вторая попытка подружиться с этой прошивкой, прошлый раз EMC не захотел работать с энкодером от принтера, который работает на этой же плате с прошивкой AI Wave 2016. Кстати BTS7960 так же был проверен на прошивке Ai Wave. В топку, как говорится. А мы переходим к тому что гарантированно работает. К stm32. Убедившись что энкодер не влезает в штатное место потенциометра (даже без кожуха) я решил нарисовать для него станину и микроскопический кардан, который будет вставлен в штатное место потенциометра. Приложил, примерил, рассчитал расстояние и прикрутил. Всё отлично, как будто так и было. С BTS7960 проделал ту же процедуру. Нарисовал "столешницу" на четырёх ногах и вклеил её на кожух одного из шкивов. Уместился миллиметр в миллиметр, как будто так и было задумано заводом. Подключил к компу, приступил к тестам. Выяснилась интересная особенность. Если направление вращения энкодера совпадает с направлением вращения баранки в программе, мотор стремится докрутить вал за пределы ограничителя. Т.е. если я проворачиваю руль к границе установленных 540 градусов, логично что руль должен остановиться. Но вместо этого он начинает проворачивать его дальше, до бесконечности. В любую сторону. Я задумался. А что если переставить контакты энкодера А и Б местами? Переставил, запустил тест. Теперь в программе руль вращается противоположно вращению энкодера. Но, внезапно, ограничение работает нормально. Ха! Да нужно просто включить инверсию в настройках утилиты MMOSFFB, раз всё заработало! Включаю инверсию, мотор начинает работать противоположным ожидаемому образом. Ну т.е. снова проворачивает его дальше в "точке границы". Я сделал ещё несколько комбинаций с включением\выключением инверсии и перестановкой контактов А и Б. Результат - мотор нормально ограничивает вращение руля (да и вообще создаёт обратную связь) только с показаниями энкодера, противоположными направлению вращения вала. Решения пока не придумал.Продолжение следует.
2 балла
-
Тяжёлый случай.......1 балл
-
@Beg мало того, что ты не понял ничего из темы итальянца, по этому поводу, хотя сам её тут рекомендовал недавно, про остальное ... Для тех кто на бронепоезде по рельсам упрощённой модели. Будет сложно, но мы попробуем. Воздействие низкого напряжения. Когда вы подвергаете двигатель напряжению ниже номинального, указанного на паспортной табличке, некоторые характеристики двигателя изменяются незначительно, а другие - резко. Чтобы приводить в действие фиксированную механическую нагрузку, подключенную к валу, двигатель должен потреблять фиксированное количество энергии от линии. Количество потребляемой двигателем мощности примерно соответствует току(амперы) к напряжению . Таким образом, когда напряжение падает, ток должен увеличиваться, чтобы обеспечить такое же количество энергии. Увеличение тока представляет опасность для двигателя только в том случае, если этот ток превышает номинальный ток двигателя, указанный на паспортной табличке. Когда сила тока превышает номинал, указанный на паспортной табличке, в двигателе начинает накапливаться тепло. Без своевременной коррекции это тепло приведет к повреждению двигателя. Чем больше тепла и чем дольше на него воздействуют, тем больше повреждение мотора. Например, давайте посмотрим на двигатель с небольшой нагрузкой.Если напряжение уменьшается, ток увеличится примерно в той же пропорции, что и напряжение. Например, уменьшение напряжения на 10% приведет к увеличению силы тока на 10%. Это не приведет к повреждению двигателя, если ток будет ниже значения, указанного на паспортной табличке. А что, если у этого двигателя большая нагрузка? В этом случае у вас уже есть большой ток, поэтому напряжение уже ниже, чем было бы без нагрузки. Возможно, вы даже приблизитесь к нижнему пределу напряжения, указанному на паспортной табличке. Когда происходит снижение напряжения, ток возрастает до нового значения, которое может превышать номинальный ток при полной нагрузке. Воздействие высокого напряжения. Люди часто делают предположение, что, поскольку низкое напряжение увеличивает силу тока на двигателях, высокое напряжение должно уменьшать потребляемую силу тока и нагрев двигателя. Это не тот случай. Высокое напряжение на двигателе приводит к насыщению магнитной части двигателя. Это приводит к тому, что двигатель потребляет чрезмерный ток, пытаясь намагнитить железо за пределы точки, в которой намагничивание является практичным. Этот текст представляет собой адаптацию «Документов Коверна», любезно предоставленных компанией Baldor Electric Co., Уоллингфорд, штат Коннектикут, под редакцией Марка Ламендолы, технического редактора EC&M. Кауэрн - разработчик приложений Baldor. На этом эффекте, а не на упрощёнке в очередной раз, и основан выбор 12 v вместо номинала, но гораздо большего по току БП для DD Итальянца, и не у него одного, и не только для MY1020. И для гораздо круче моторов. Плюс снижение пускового, нагрева итд, без проигрыша в конечной силе момента. Не забудем возможность работы и на тихих 16khz для тяжёлых моторов, с нормальным током, при 12вольт. 24 уже бтс не тянет c 24v10A БП. В проделанных и описываемых данных тестов, ток разный по тому что с 12v33а идёт компенсация момента большим током, в причину пониженного напряжения для мотора от его номинала. И БП способен выдать этот ток и гораздо больше, этот бп с запасом. Когда ток с запасом нет и просадки по напряжению. Мотор берёт ~13A с него для 5 nm в сотке силы mmos. Где два БП, для получения большего напряжения, 12v12.5а и последовательно к нему 12v33a, ток идёт с бп с меньшим током т.е. 12.5.а. Но тут напряжение - почти номинала для мотора т.е. чуть меньше 24 вольт - 22вольта. Мотор тут забирает ~7A. С тем учётом что он высаживает ещё при этом этот БП 12 амперник. Ровно так же, когда мотор работает только на одном этом БП. По итогу. 100%gain 520g/m - 22v/12A БП( ~7A потребление) ~156W, и 100%gain 520g/m 12v33А БП (~13A потребление). -156W. Цитата что 100% gain = 100% скважность ШИМ, что эквивалентно прямому присоединению БП к мотору (без BTS) Это очередная упрощённая модель. Это не эквивалентно прямому подключению к БП, уж тем более с BTS и уж тем более с MMOS. Уже по одной простой причине. Хотя их несколько. И первая это целые/сгоревшие (как нить в лампочке накаливания провода по умолчанию установленные в реле на 5А).... в последующем замененные на гораздо большей квадратуры. Там 4 контакта два из них собраны были одним пучком, в итоге по два провода вместо одного. Говоря о MMOS, они остались целыми, в там же только на новом реле, в максимальных настройках....без каких либо намёков, что они не выдерживают нагрузок. То же самое реле, было целым с тестами arduino до того как были ТАМ выкручены настройки на максимум. Вот тут провода и погорели. Не удивлюсь, но всё было похоже на выкачку с БП расчётных 35-40A тока застопоренного якоря для этого мотора, для 12 вольт запитки. Вот тут это похоже на прямое подключение. Плюс, всё с тем же БП12м33а крутящий момент был 7nm а не 5 что есть максимум на MMOS, включая и добавленный min force. Так же видео с тестом в 5 nm выше. Сюда добавим, вылет ffb на несколько секунд, из за нагрева защитных диодов, это с ffb max на ардуино, и очень быстро и сильно нагревающийся мотор. В других случаях, т.е. в сравнение с MMOS, этого нет. НО и это не был BTS. Это был нормальный, правильный драйвер. Читай сюда. И почему BTS фигня vs тот что в описании. Но и с ним НА MMOS - максимальные настройки это грёбанный одуванчик vs на ардуино. Затем, я это давно проверял с тем 12в12.5а БП на прямое подключение с амперметром заллоченный мотор. Он забирает 12a. Если через BTS - 7.1 балл
-
Это нормально. Всегда трекаться начинает, как только таможню пройдёт. Сейчас начнёт быстро прыгать по отделениям, пока не придёт в твоё1 балл
-
Ложная предпосылка. Исторические гонки не хороши. Они такие же как сейчас.1 балл
-
1.остановленный мотор будет потреблять ток = напряжение/активное сопротивление иначе как можно на MY1025 при напряжении 1В обеспечить 150 А току? и что? мотор сможет такой ток потребить? 2. у моторов с возбуждением от постоянных магнитов есть такая характеристика, как "постоянная крутящего момента" в размероности н.м./А - показывающая соотношения потребляемого тока и момента на валу к примеру на PIK12-3/10-3 она равна 0,2 н.м./А, что означает - что при потреблении 10А тока момент на валу будет 2н.м. и так далее если не дать мотору нормальное напряжение, то и ток он брать не будет =) тесты проводились на разной частоте... я не понимаю как может мотор тянуть 520g/m и при 7А и при 13А одновременно... давай договримся что 100% gain = 100% скважность ШИМ, что эквивалентно прямому присоединению БП к мотору (без BTS) и тогда твои тесты и слова (если я правильно тебя понял) можно трактовать как: "я подавал и 12В и 22В на мотор, в итоге получил одинаковую мощность на стоячем моторе и одинаковый момент на валу, который не зависит от питающего напряжения" вот например мой тест на коленке: (сорян за мат, снимал не для форума... ) БП регулируемый в диапазоне 4-27В, ток максимальный до 80А, мотор 1ПИ12 (на 60В) - ток я не мерял очевидный результат теста - при увеличении напряжения - пропорционально увеличивается и момент на валу однако твои тесты выглядят как будто момент не должен зависеть от питающего напряжения и при увеличении напряжения ток должен падать, потому что мотор всегда и везде же будет брать мощность (0,55кВт) а момент должен оставаться на одном уровне... даже если ток упал и сила магнитной индукции упала, ( она прямо пропорциональная току в соленойде) но у тебя по прежнему сила отталкивания соленойда (катушки ротора) от магнита такая же - чудеса прямо-1 балл
-
С темы не съезжай Как у тебя сточий мотор в 100 % силе при 12 вольтах потребляет 13А, а при 22 - 7А? Ты правда хочешь сказать, что если я просто добавлю напряжения на своём БП, то у меня не увеличится максимальный момент? Я так понимаю ты сейчас с законом Ома споришь? То что "для обеспечения такой же мощности" - речь идёт о механической мощности, которая равна (обороты) х (момент) при меньшем напряжении да, будут меньше обороты, и надо снимать большой момент с вала А на высоком напряжении мы снимаем меньший момент и получаем меньший ток, при этом да, вот твоё постоянство мощности и обратная зависимость тока от напряжения Я тебе ещё раз напишу что ток, потребляемый двигателем прямо пропорционален сумме из (механические потери) + (полезный крутящий момент) Больше ток - > больше момент. Иди почитай учебники что такое сила ампера и как и почему работет электродвигатель. Удачи.-1 балл