Лидеры
.thumb.JPG.521fa42d5b72ef9eb5782397aef0af17.JPG)


Популярный контент
Показан контент с высокой репутацией 08/14/19 во всех областях
-
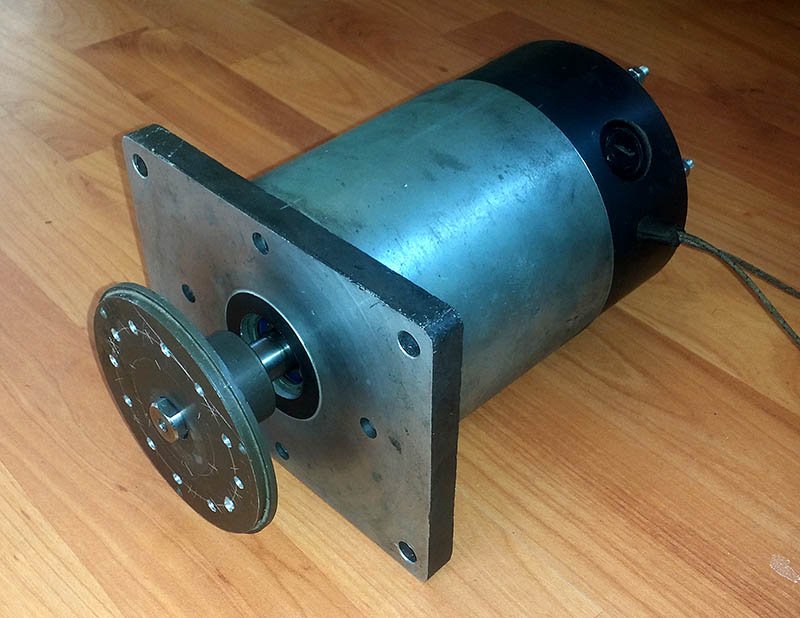
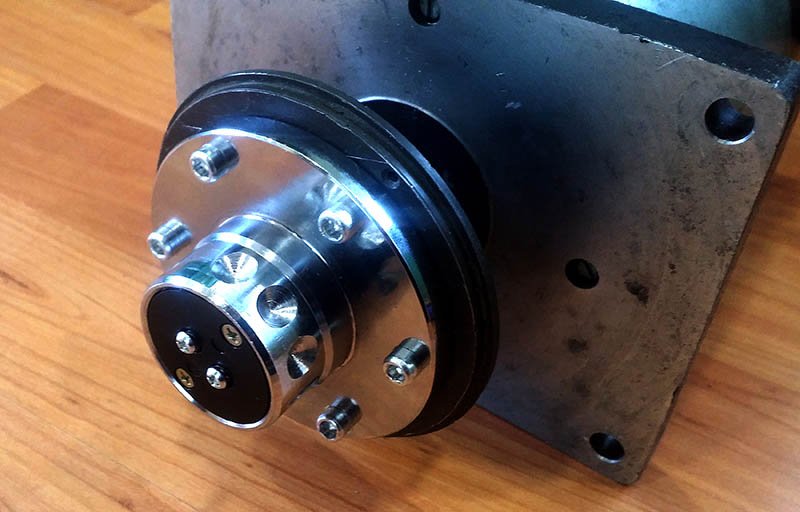
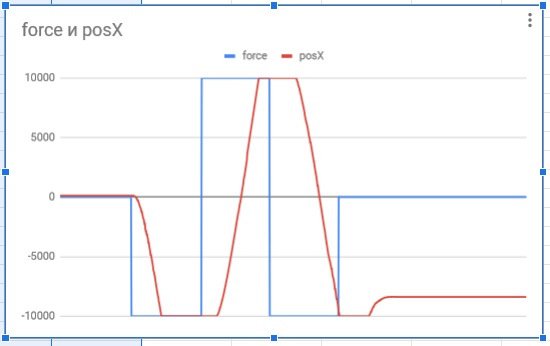
Приветствую, господа симрэйсеры!!! В связи с повышенной активностью в области DIY баз, а особенно с интересом проявляемым к DD проводам построенным на относительно бюджетных коллекторных и без коллекторных моторах постоянного тока предлагаю обсуждать подобные проекты в отдельной теме, ибо у DD есть своя специфика. И для затравки предлагаю свой проект. Поскольку мне было лень делать ременной или цепной привод, благодаря ссылкам предоставленным уважаемым Sieben обратил внимание на проекты DD построенные на моторах от электроскутерах. В процессе поиска мотора мне попался на глаза вот этот двигатель. Это двигатель привода лентопротяжного механизма от ЕС ЭВМ. По характеристикам данного мотора - номинальный момент на валу 1.5 н.м., максимальный 3 н.м., рабочее напряжение 30 вольт, 1100 оборотов. Судя по всему это должен был быть довольно таки тяговитый и низко оборотистый двигатель. Поскольку задачи которые на него возлагались в стоке (крутить тяжелые бобины с пленкой и резко менять направление) была надежда на результат. Также я надеялся на то что в советские времена характеристики занимали а не завышали как сейчас))) Сразу хочу попросить прощения у Syava который интересовался какой мотор выбрать. На момент возникновения вопроса проект был ещё стадии разработки и советовать непроверенным привод я не мог. Что ещё привлекло в этом двигателе так это то что у него на валу уже стояла муфта что избавляло от похода к токарю и открытый вал в задней части что облегчало крепление энкодера. Вал оказался не каленым и легко просверлился обычным светлом. Кстати, лайфхак как без токарного станка просверлить вал двигателя вдоль - надо просто включить двигатель и любой приспособой (я просто зажал сверло в дрель и держал её) направить в центр оси. Сверло само зацентруется за счет центростремительной силы. Главное не перекашивать сильно сверло что бы оно не завязло в металле и не сломалась. В получившиеся отверстии была нарезана резьба и установлена шпилька для муфты на фиксатор резьбы. Также в задней крышке мотора были просверлены отверстия для стоек крепления энкодера (толщина задней стенки в 5 мм. легко позволила это сделать). Были заменены оба подшипниках как умершие от старости. Коллекторный узел оказался на удивление практически не изношенным. Единственный недостаток этого мотора это вес в 7 кг. Для крепления баранки на Али был приобретен вот такой квикрелиз. Держит он намертво, но имеет свой недостаток в виде веса в 500 грамм. У меня к нему планировалась лёгкая пластиковая баранка, так что это меня не смутило. Но если кто будет задумываться о таком квикрелизе - помните о весе!!! После чего все было собрано и включено. [/url Помня о том что Sieben упоминал о том что лучше использовать блок питания меньшего напряжения, но большего тока, из загашника был добыт блок питания 12-14 вольт, 50 ампер. Однако на максимальных нагрузках при полном ффб бп уходил в защиту. Вспомнив о рекомендации повесить банку конденсаторов, было сделано. В результате бп на полной силе работает нормально. В процессе отладки выяснилось что энкодер с резисторами на 500 ом на каналах нормально работает на тестовом ноутбуке и совершенно отказывается работать на стационарном компе. Установка резисторов на 200 ом решила проблему. Хочу сказать что у меня также присутствует проблема с педалями, которые мягко говоря не работают. Ну и в завершение мой график стептест.
 3 балла
3 балла -
Проект обошелся в - контроллер - 700 р. BTS7960 - 400 р. Квик - 1100 энкодер - 1000 р. Мотор - 2500 р. Итого - 5700 р. Блок питания, мелочевка, железо, руки - нахаляву.2 балла
-
Только теоретики отталкивались от отзывов практиков, которым наверняка не так смешно.2 балла
-
Я только-только Фанатеку её оплатил, до посредника она ещё не доехала.1 балл
-
Какой факт-то? Нет никакого факта. Во-первых, движения руля по сети (у соперников) передаются крайне условно и абсолютно неточно, они совершенно неестественные. Во-вторых, с чего ты взял, что это его ускоряло? То, что он быстрее других ехал, не говорит о том, что это его ускоряло, это говорит о том, что другие тупили. Если хочешь установить факт - запиши телеметрию. И проедь без и с таким "читерским" поворотом руля, и посмотри, ускорит ли это тебя. Ты на графиках увидишь всё от и до. Я тебе гарантирую, что никакого ускорения у тебя не будет. Если не знаешь, как анализировать, нажми ALT+L, проедь круги и из папки "мои документы\iracing\telemetry" пришли мне файлы получившиеся. Я тебе на графиках покажу, что ты ошибаешься. Вот это будет точкой. :) Ровно наоборот, перекручивание руля тебя замедляет в айрейсинге, ровно так же, как в реальной жизни.1 балл
-
Зафиксировал Акулу V2 к профилю и с помощью шарнирных соединителей (поворотный кронштейн крепления 20, 30, T14) зафиксировал к тройному профилю (см. фото). Не потребовалось ничего сверлить. Мне такое решение показалось хорошим т.к. регулировка руля достаточно гибкая и удобная. P.S. Удлиняющий хаб для руля может помочь с контролируемым намотом провода.
1 балл
-
@MMt загрузка процессора ни о чем не говорит в таких однопоточных играх. Определить что не хватает скорости процессора или оперативки можно только по фпс1 балл
-
Насколько силен ффб? Глючный ли софт? Я не очень знаю, что такое дфгт, но, скорее всего это дно какое-то днищенское. Фанатики разные бывают ведь? И самое интересное во всей этой теме - как долго и насколько затратно обошлось данное изделие? Однозначно,конечно, очень интересный проект!1 балл
-
И каково на практике-то???1 балл