Лидеры




Популярный контент
Показан контент с высокой репутацией 07/06/22 во всех областях
-
Привет. Стойка базы слишком далеко от сиденья. В реальности будет ближе намного. Рычаги для клавы и мышки (как я понял) крепятся на какую то перекладину. Она лишняя , крепи сразу к стойке руля. Также справа не понятно зачем здоровая хрень из 120 профиля) Для КПП и прочего можно сделать все компактнее и достаточно продуманного 40*40. Да и как ту будешь садится в кокпит?) Вообще использование 120-го профиля не особо рационально. Хотя у меня у самого стойки базы из 120-го, но прочность явно излишняя. Основу уж точно можно сделать из 40*80. В плане прочности ничего не потеряешь. По педальному блоку не очень удобно будет регулировать, можно доработать. Но тут на любителя, возможно тебе подойдет такой вариант.1 балл
-
Не капай на мозг, просто жди.1 балл
-
Уважаемый propeler спасибо тебе за то что ты делаешь.1 балл
-
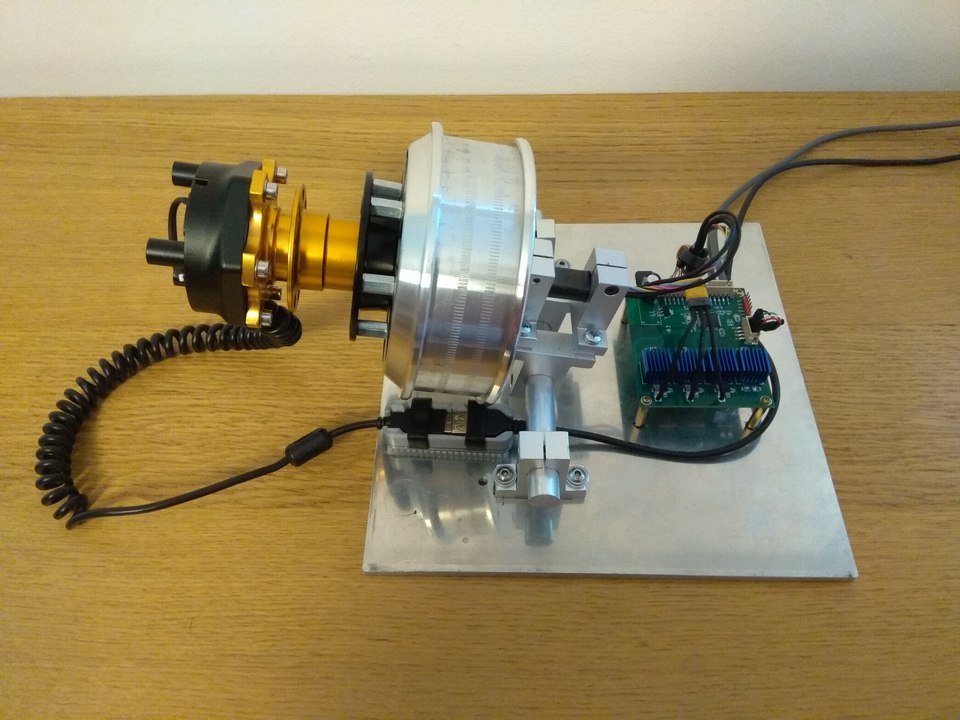
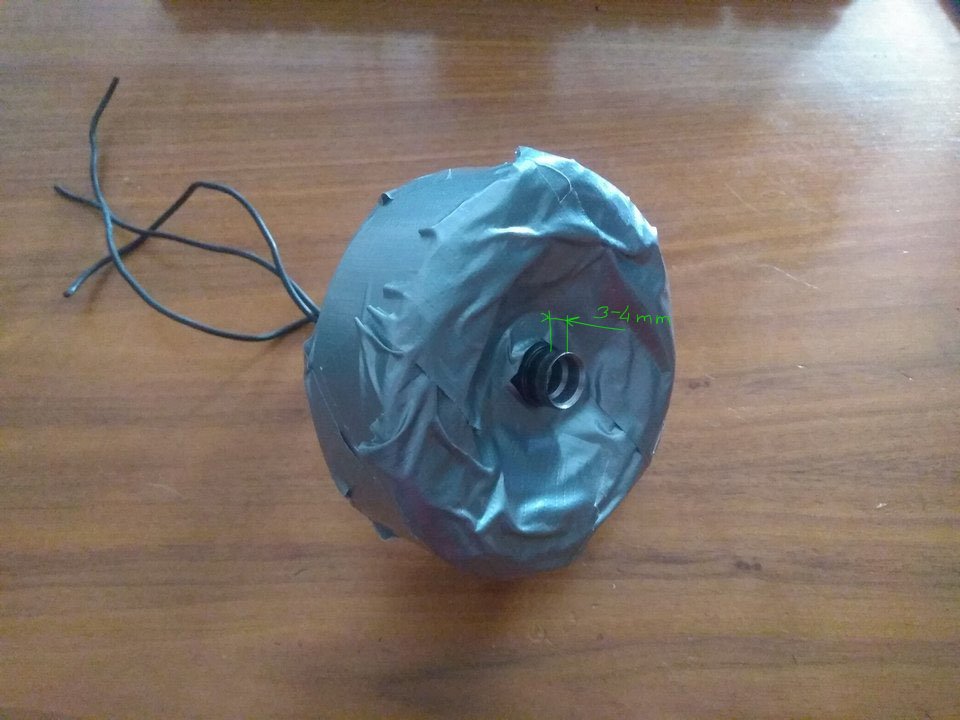
Пока товарищ @Kolerне делиться своей красотой поделюсь своими наработками :) Представляю вашему вниманию руль для создания которого понадобиться всего лишь вот это набор инструментов: Этот набор напечатанных деталей: И стандартные покупные элементы(за исключением электроники ) чтобы собрать такую базу: И так как и раньше нам понадобиться мотор от гиро скутера. Мне по душе вариант с шестью лучами на фронтальной панели., уж очень легко на нем центрировать все и делать отверстия под квикрилиз. Разбираем его и дорабатываем статор. Точнее вал статора. Нам его надо рассверлить. Чтобы не выковыривать потом стружку предварительно обматываем скотчем. Рассверливаем конусным сверлом пока до упора подшипнике останется 3-4мм. Этого достаточно чтобы вал держался в подшипнике и будет место под энкодер. Потом сверлом на 6 досверливаем отверстие чтобы соединилось с уже существующим в валу дабы пропустить через него провода: В барабане конусным сверлом сверлим отверстие по центру до ширины подшипника, и 6 отверстий под крепление квикрилиза( в моем случае на окружности 70мм). Энкодер вклеиваем эпоксидкой в мелкий 3д печатные переходник и вставляем в подшипник чтобы не торчал за уровень барабана: К сожалению забыл сфотографировать кадр с установкой магнита перед сборкой в базе квикрелиза, опишу на словах. Магнит вставляем во вторую 3д печатную деталь, в базе квикрилиза немного рассверливаем посадочное место конусным сверлом и вставляем в посадочное место этот печатный переходник. Крепим квикрелиз на стандартных высоких гайках M5, они как раз по высоте базы релиза. Печатный переходник магнита какраз натурально центруется между лучами барабана. Аккуратно ставим обратно барабан со всем этим добром, и зажимаем все в конструкцию из подпорок валов 16мм и куска вала того же диаметра. Конструкции. как все скрутить видно на основном фото. Вуала. Готово. Подключаем плату, прикручиваем баранку - готово! Перечень всех стандартных элементов которые нужны для базы: Опора вала SK16 - 6шт Кусок вала 16мм длиной 200мм - 1шт Высокие гайки M5 - 6шт Винты М5x10 - 6шт (крепление стоек к барабану) Винты M5x20 - 4шт(для центрального узла базы) Гайки M5 - 4шт(для центрального узла базы) Квикрилиз https://pl.aliexpress.com/item/4001044784302.html - 1шт Мотор от гироскутера - 1шт В качестве базы можно использовать все что угодно к чему сможете прикрутиться. У меня кусок люминя 6мм. По ценам Польши все про все (вместе с электроникой и пластиной на основание) в зависимости от удачи по покупке мотора выходит по цене от 140 до 180 долларов и не требует дополнительного заказа изготовления чего-то сложного. Вот такая вот исчтория. З.Ы. Я не представляю себе более простого и дешевого в изготовлении ДД FFB руля. А вы?
 1 балл
1 балл -
Поехали. Будем заводить кастомную плату. Первым делом подключаем USB как на рисунке. Для прошивки качаем STM32CubeProgrammer и собранную прошивку здесь https://github.com/o-devices/bldc-ffb-wheel-firmware/releases/tag/v1.0 с именем btn8982-with-absolute-encoder.hex. Прошивку можно записать двумя способами. Или через STLINK или по USB ы режиме DFU. Вариант с STLINK. 1)Подключаем одновременно STLINK и USB. Запускаем STM32CubeProgrammer. Видим такое окно. В списке (1) выибраем STLINK, жмем кнопку (2) для того чтобы обновить список подключенных устройствб и жмем (3) для подключения по STLINK. 2) В открывшемся окне жмем (4) чтобы выбрать hex прошивку, выбираем скачанную версию hex 3) Жмем download (5) и после завершения прошивки жмем disconnect (6). Перевтыкаем USB устройства чтобы перезагрузить его Для DFU процесс отличается лишь тем что перед подключением USB замыкаем перемычкой два контакта отмеченых красным на самой первой картинке, а в списке (1) выбираем USB. Все остальное аналогично. После заливки прошивки снимаем перемычку и перевтыкаем USB После заливки прошивки устройство будет отображаться в системе: Для настройки девайса используется программка. Качаем ее здесь https://github.com/o-devices/bldc-ffb-wheel-ui/releases/tag/v1.0 Запускаем. Сначала там будет какой-то рандом настроек. Ставим примерно такие: Нажимаем в обязательном порядке сначала Write to controller для записи настроек в контролер и потом Save чтобы сохранить настройки в flash и они сохранились между переподключениями. Выключаем программу, перевтыкаем USB чтобы перезагрузить контролер, запускаем программу - настройки должны сохраниться. Вся эта часть работает даже без энкодера и мотора. Следующим этапом будет подключение мотора и энкодера. P.S. Odrive то же самое. только заливаем прошивку с именем odrive-with-absolute-encoder.hex1 балл
-
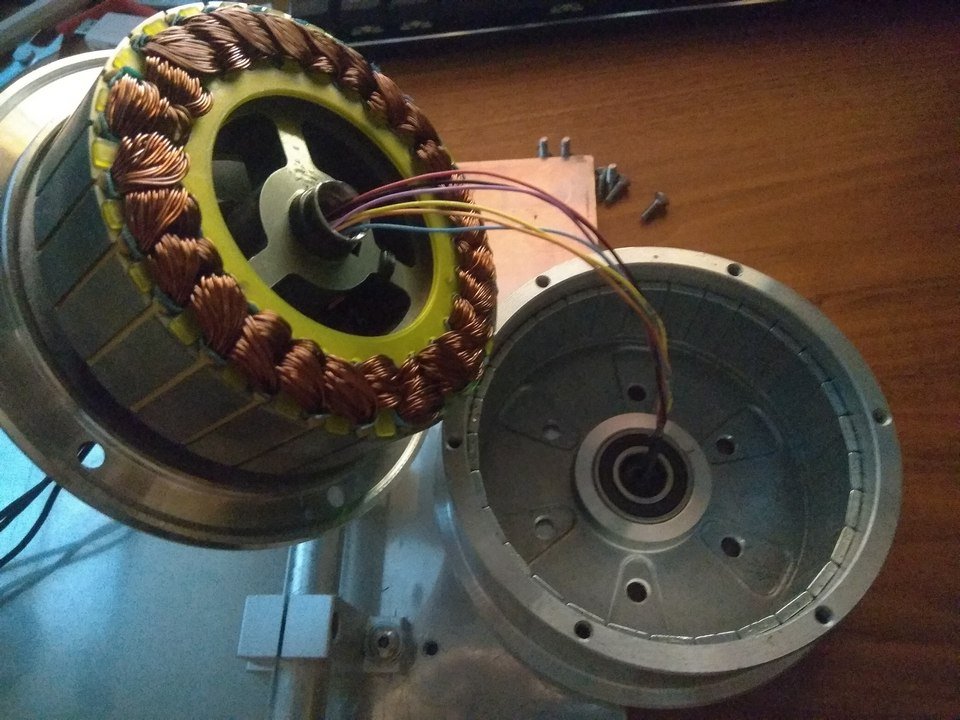
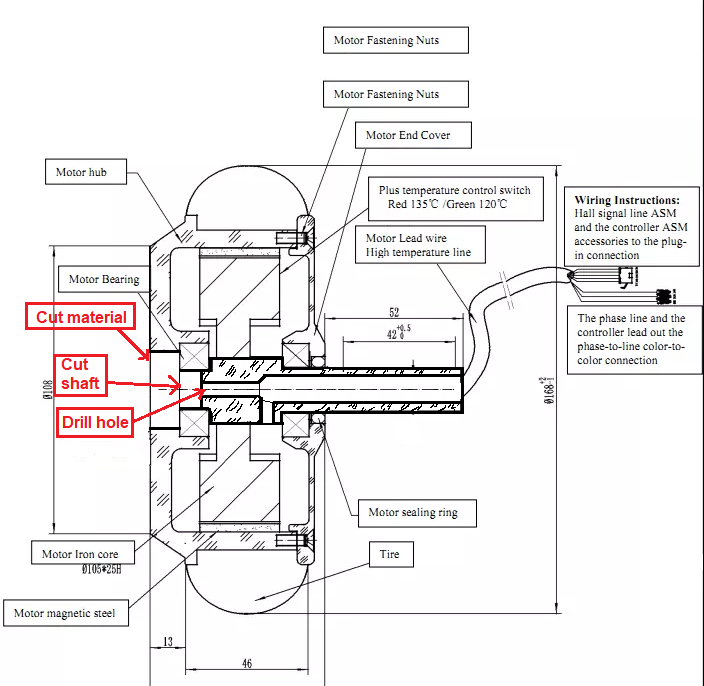
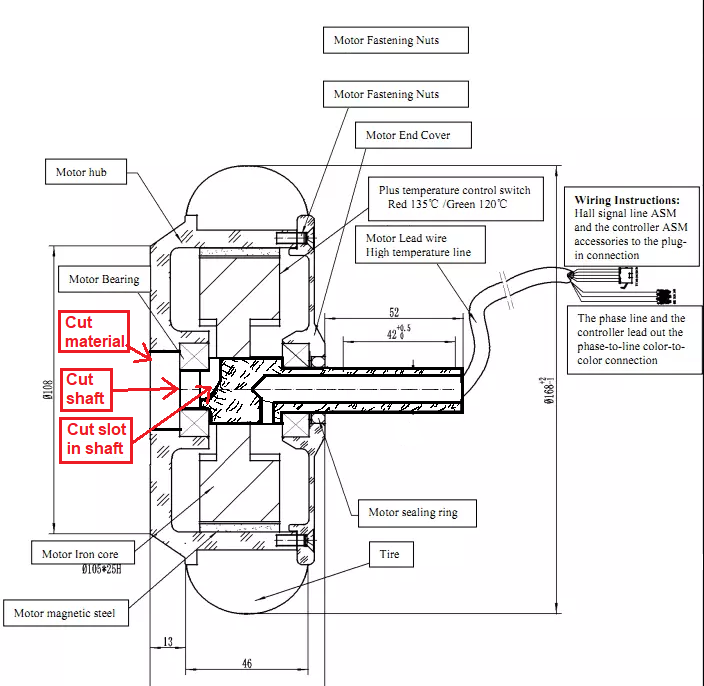
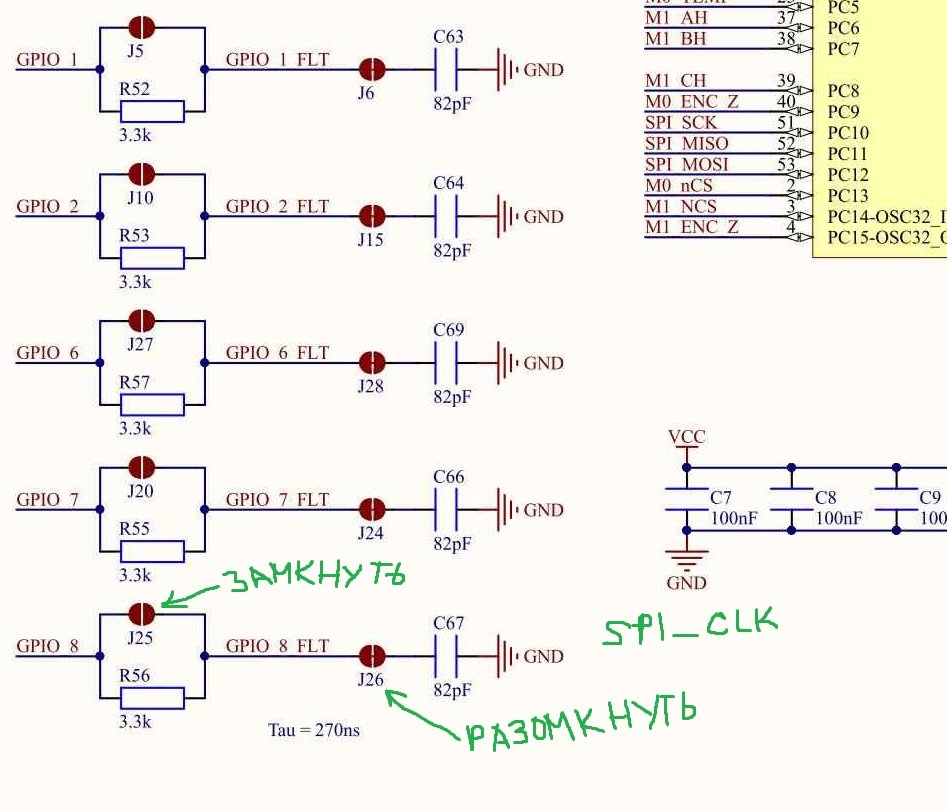
Часть механическая. Наш мотор - мотор от гироскутера. Лучше всего если это будет мотор с плоскость на внешней стороне, как варианты: В оригинале вал мотора уже имеет внутри отверстие вывода проводов, но к сожалению отверстие не сквозное: В идеале будет просверлить это отверстие насквозь. Если нету доступа к такому оборудованию, то можно просто сделать пропил на верхнем краю вала в который пройдут провода. Можно, но при таком раскладе удобство проводки проводов от энкодера не на высоте. Также надо укоротить вал со стороны подшипника. Это освободит место в подшипнике чтобы потом туда поместить 3D принт с энкодером. В самом же барабане делаем отверстие и разворачиваем его по максимуму. Картинки иллюстрирующие идею для обоих вариантов.: У меня сделано по второму варианту. Просто отпилено дремелем. Вся идея такая, что 3D принт с энкодером фиксируется в свободном пространстве на подшипнике, а магнит на переходнике - на барабане колеса, как на фото из первого поста. Уже позже у меня возникла идея, что можно не пускать провода от энкодера через мотор, а пустить их вместе с проводом который будет идти от баранки к базе. Сам энкодер установить не на вал а на барабан, а магнит на вал. Но этот вариант я еще не реализовывал и какие подводные камни с ним могут возникнуть - не проверял. Но сейчас я думаю я бы пошел по такому пути если бы делал второй. Крепление идеально если достанется половинка от гироскутера родная, и разместить потом все на этой половинке: Мне не повезло, у меня было колесо без базы - поэтому пришлось мудрить с основанием. Здесь у кого на что хватит фантазии. ODrive Переделки по Одрайву минимальны. Нужно найти на плате перемычки J25 и J26. Перемычку J25 надо замкнуть путем напайки на нее чего нибудь, а J26 разомкнуть. Например путем разрезания дорожки на перемычке. GPIO 8 используеться как шина SPI для енкодера и коммуникации с баранками Thrustmaster, и нам не нужен фильтр на ней.
1 балл