Лидеры


Популярный контент
Показан контент с высокой репутацией 04/22/22 во всех областях
-
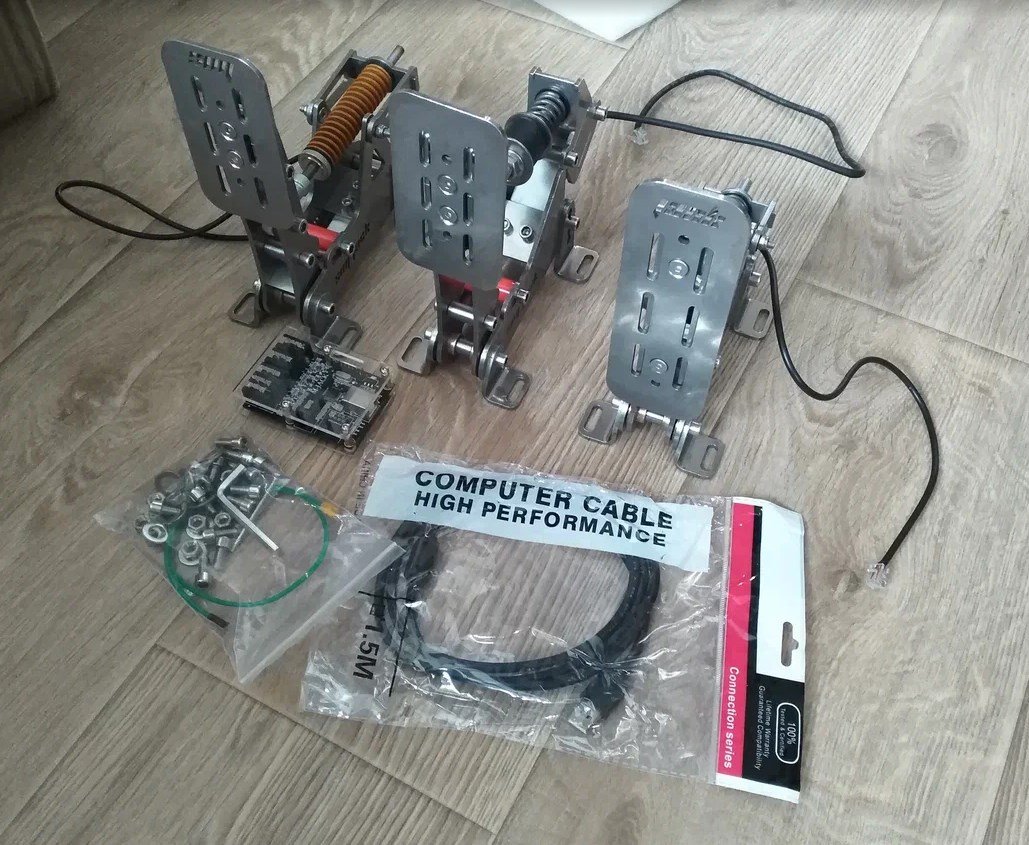
всем привет! получил педали SimJack с алика, заказывал тут: https://aliexpress.ru/item/1005003590502264.html в комплекте сами педали, usb tybe B шнурок (1,5м), контроллер, крепеж м6 (винты din912, гайки, ключ-шестигранник), провод для заземления механика: - все 3 педали выполнены из нержавеющей стали, толщиной 3мм - на всех стоят LC датчики (на тормозе LC На 70 кг) - на педалях газа и на сцепления LC датчики без маркировки, на них давит маленькая измерительная пружинка - шарниры педалей - подшипники скольжения из бронзовой втулки и стальной оси (советую смазать, ибо с завода там сухо) доступные регулировки: - наклон всей предали на монтажных уголках - преднатяг упругого элемента при помощи регулирочной гайки - изменение положения по высоте точки крпеления упругого элемента - изменение диапазона хода педали за счет перемещения ограничителя хода - *изменение положения накладки на педалях (при выполении зенковки на накладках) блок управления: - 4 аналоговых входа (RJ11) для подключения 3х педалей и ручника на LC - 1 цифровой вход (RJ11) для подключения секвентальной кпп (2 кнопки) - USB type B для связи с ПК - для преобзования сигналов с LC примнены 4 однотипных блока на операционном усилителе GS8331 с обвязкой - микроконтроллер - китайский клон STM32 с маркировкой STM32FEBKC6T6 (технический аналог STM32F103C6T6) - в системе драйверов не требует, определяется как стандартное HID устрйство "SIM-JACK", имеет 4 оси и 2 кнопки - отсутствуют элементы защиты от наводок и помех, при использовании с ДД выявлено влияние работы FFB на руле на оси педалей, ситуацию исправляет USB изолятор косяки: (надеюсь в скором времени получится решить это программным образом путем замены прошивки) - высокая дискретность оси газа: на максимальном ходе педали получилось 340 положений - низкая частота передачи данных: данные от устройства передаются с интервалом 15мс, что соответвует частоте 66 Гц полезные ссылки: USB изолятор https://aliexpress.ru/item/1005001369085297.html упор педали тормоза https://disk.yandex.ru/d/68RoUznRA2CWmQ монтажная плита https://disk.yandex.ru/d/HW8E61fllS8AXg утилиты для калибровки осей в Windows: DXTweak_RUS https://disk.yandex.ru/d/aHKwjnM1KY5gfw DIView https://disk.yandex.ru/d/GhEWaVImopWOfg фотоальбом на яндекс диске: https://disk.yandex.ru/a/ndme8YmXhdVq1Q видеообзор
 1 балл
1 балл -
@REEF в целом претензий в эксплуатации на сегодняшний день к педалям нет у ZERgyt -а можно приобрести готовый контроллер для подключения 3х LC по цене 5000р (цена была актуальна на 6 апреля) я считаю что да, цена на сегодняшний день при оплате через qiwi ~ 17,200 р при наличии недорогой лазерной резки под боком - возможно я выбрал вариант покупки готовых педалей1 балл
-
По настройкам Enable constant via sine - включает поддержку еффектов по принципу как их шлет Raceroom. Пока я встречал только в одной игре. Для всего кроме рейсрум лучше снимать. Steering range - думаю без вопросов. Дальше все с припиской gain - это настройка силы отдельных эффектов. Все что в плюс крутит в одну сторону все что в минус - в другую. Damper не реализован на данный момент, Total - общий масштаб усилия который накладывается на все сразу. Если нужно инвертировать все еффекты достаточно инвертировать Total. Soft stop range - расстояние в процентах от Steering range на котором нарастает усилие упоров в конце диапазона. Значения вывода оси джойстика при этом на этом диапазоне уже стоят в максимуме Вкладка Hardware неактивна пока не введен Serial Key для конкретного Device ID. Когда правильный ключик введен и нажата кнопка Register программа переходит в полный режим и на вкладке Hardware становиться доступна кнопка Enable advanced settings. (известный баг - ключ не сохраняется между перезапусками контролера - работаю над этим) Кнопка Enable advanced settings добавлена чтоб случайно не поменять что не надо. По хорошему все на этой вкладке надо настроить только раз и забыть. Invert encoder direction - меняет направление вывода энкодера. Делает то же самое что смена подключение выводов A и B к контролеру. Я предпочитаю чтоб при повороте руля по часовой значения по оси увеличивались. A/B pullup - ставить для енкодеров которым нужна подтяжка выводов к питанию. Большинство енкодеров по типу боченков Omron, но смотрите по инструкции к енкодеру надо или нет. Encoder CPR - суммарный CPR энкодера, с учетом редукции(если есть) PPR * 4 * отношениередукции Pole pairs - количество пар магнитов мотора. У ховербордного мотора в большинстве случаев их 15 FOC debug - вывод по двум осям парных параметров FOC алгоритма. Полезно при настройке параметров P Gain / I Gain. Поставить в None для обычного использования. Я обновил прошивку чтоб None было по дефолту. P Gain / I Gain - параметры алгоритма FOC. Их настройка отдельный вопрос, надо писать отдельный пост с картинками. туда же Constant reading smoothing. Параметры важные от них зависит "шумность" и точность алгоритма, но не простые в настройке. Будет отдельно по ним. Output power - общая мощность в процентах от физически возможной. Начинайте с низких значений и повышайте по чуть чуть пока мотор сохраняет стабильность и не перегревается. Кнопки - прочитать что записано в контролере - записать в контролер. На каждой вкладке свои. Изменения на вкладке еффектов сохраняются отдельно вкладки hardware.
1 балл