Лидеры



Популярный контент
Показан контент с высокой репутацией 04/20/22 во всех областях
-
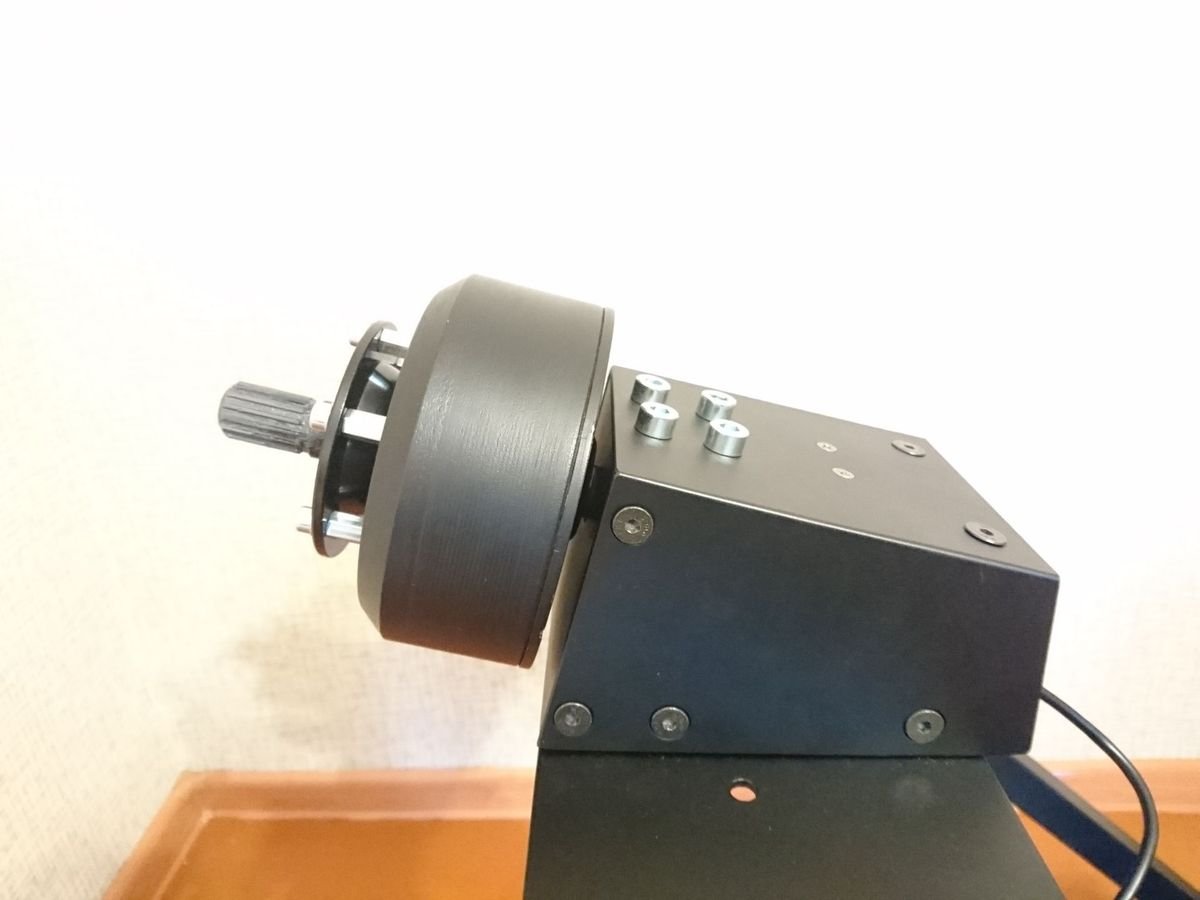
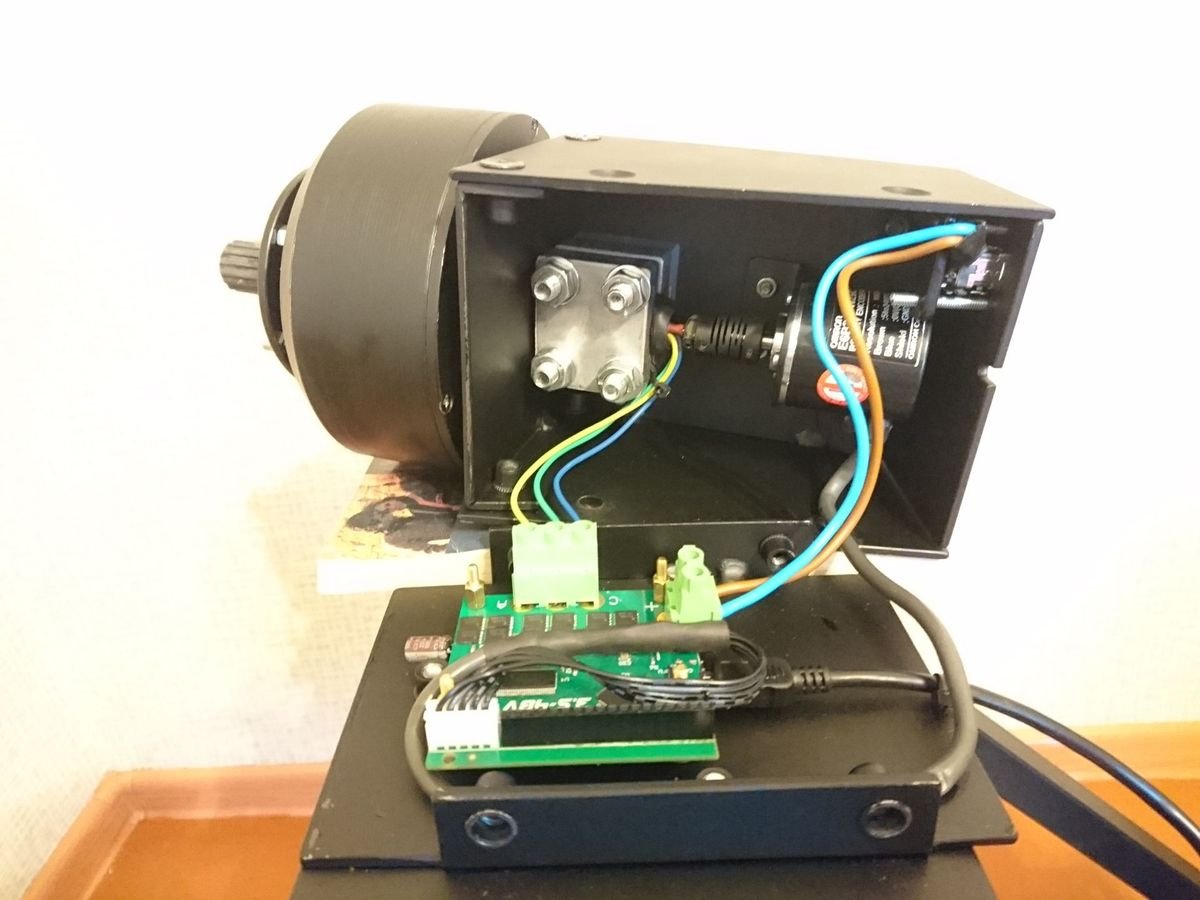
Много хороших вариантов компоновки, вот мое исполнение
 4 балла
4 балла -
Это просто восхитительно! Только что протестировал новую прошивку в иРе и АЦЦ. Никакого дампинга, руль быстрый и сильный. Ощущается каждый поребрик, неровность, нет смазываний как у ременных рулей. Надо только немного покрутить P и I будет, есть небольшая тряска при отпущенном руле из рук, плюс в АЦЦ бывает выходит немного в резонанс при рулёжке. Ну и самое главное, очень жду поддержки тормозного резистора. При резких сменах направления вращения (в основном при тестах wheelcheck) выбивает БП. На моём коллекторном руле такого нет, БП тот же, майнерский на 1500W 12V2 балла
-
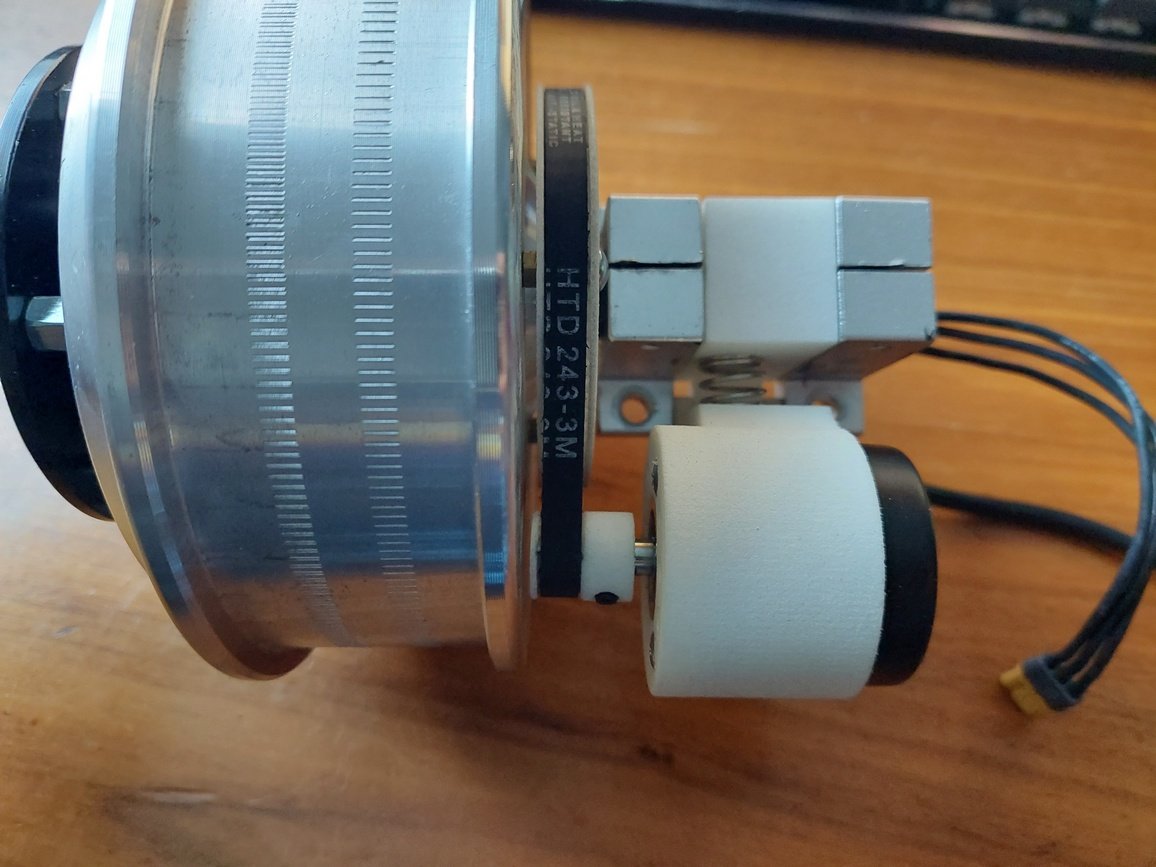
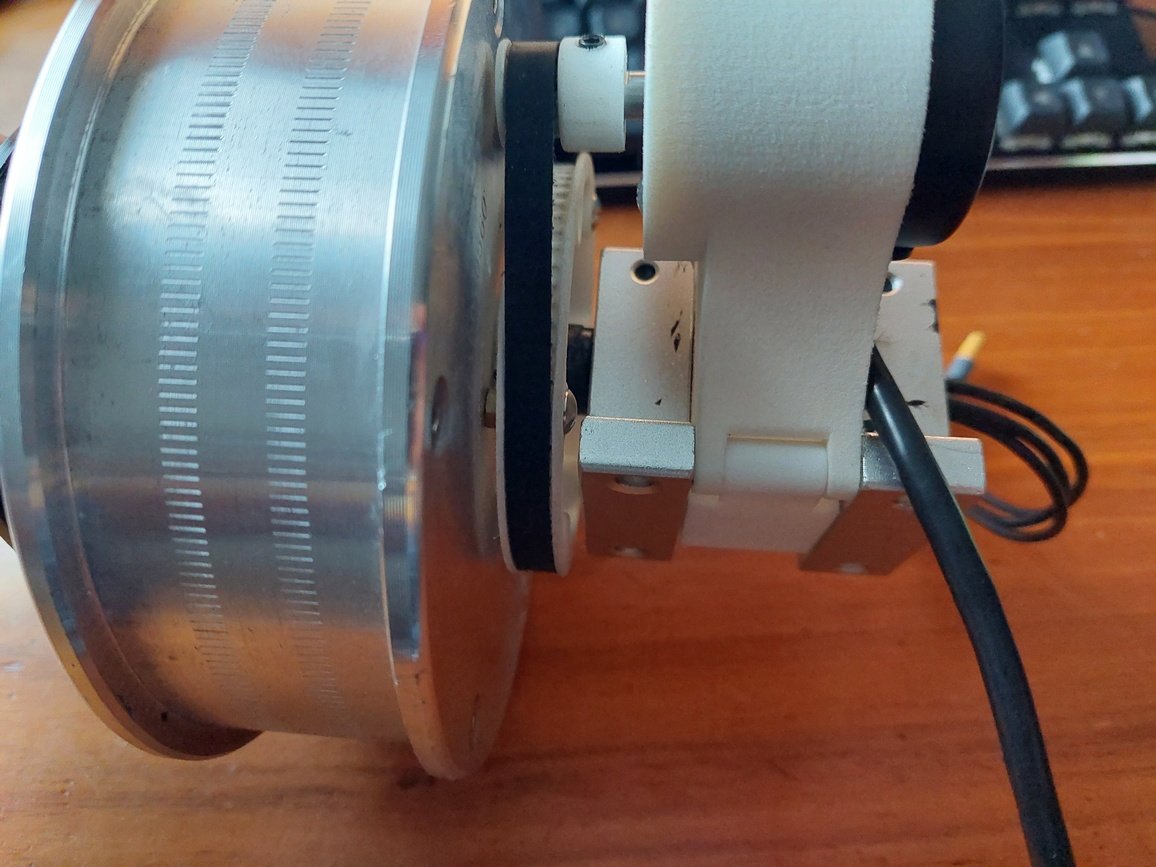
Мой вариант крепления енкодера. Подпружиниваю чтоб скомпенсировать несосность главного шкива на моторе. Как по мне работает хорошо, и более менее компактно.
2 балла
-
По настройкам Enable constant via sine - включает поддержку еффектов по принципу как их шлет Raceroom. Пока я встречал только в одной игре. Для всего кроме рейсрум лучше снимать. Steering range - думаю без вопросов. Дальше все с припиской gain - это настройка силы отдельных эффектов. Все что в плюс крутит в одну сторону все что в минус - в другую. Damper не реализован на данный момент, Total - общий масштаб усилия который накладывается на все сразу. Если нужно инвертировать все еффекты достаточно инвертировать Total. Soft stop range - расстояние в процентах от Steering range на котором нарастает усилие упоров в конце диапазона. Значения вывода оси джойстика при этом на этом диапазоне уже стоят в максимуме Вкладка Hardware неактивна пока не введен Serial Key для конкретного Device ID. Когда правильный ключик введен и нажата кнопка Register программа переходит в полный режим и на вкладке Hardware становиться доступна кнопка Enable advanced settings. (известный баг - ключ не сохраняется между перезапусками контролера - работаю над этим) Кнопка Enable advanced settings добавлена чтоб случайно не поменять что не надо. По хорошему все на этой вкладке надо настроить только раз и забыть. Invert encoder direction - меняет направление вывода энкодера. Делает то же самое что смена подключение выводов A и B к контролеру. Я предпочитаю чтоб при повороте руля по часовой значения по оси увеличивались. A/B pullup - ставить для енкодеров которым нужна подтяжка выводов к питанию. Большинство енкодеров по типу боченков Omron, но смотрите по инструкции к енкодеру надо или нет. Encoder CPR - суммарный CPR энкодера, с учетом редукции(если есть) PPR * 4 * отношениередукции Pole pairs - количество пар магнитов мотора. У ховербордного мотора в большинстве случаев их 15 FOC debug - вывод по двум осям парных параметров FOC алгоритма. Полезно при настройке параметров P Gain / I Gain. Поставить в None для обычного использования. Я обновил прошивку чтоб None было по дефолту. P Gain / I Gain - параметры алгоритма FOC. Их настройка отдельный вопрос, надо писать отдельный пост с картинками. туда же Constant reading smoothing. Параметры важные от них зависит "шумность" и точность алгоритма, но не простые в настройке. Будет отдельно по ним. Output power - общая мощность в процентах от физически возможной. Начинайте с низких значений и повышайте по чуть чуть пока мотор сохраняет стабильность и не перегревается. Кнопки - прочитать что записано в контролере - записать в контролер. На каждой вкладке свои. Изменения на вкладке еффектов сохраняются отдельно вкладки hardware.
1 балл
-
И так, ребятушки, обновочка к Пасхе! Новая прошивка для ODrive. C полноценным FOC внутри. Тяжелый руль при подключении питания - в прошлом. Вот видосик как сейчас крутиться руль когда подано питание: Прошивка и UI тут https://github.com/o-devices/bldc-ffb-wheel/tree/master/firmware Для форумчан доступна полная версия, так что кидайте DeviceID с последней вкладки UI в личку - скину ключик. Из нового: - возможность использовать как энкодеры по типу омроновских так и AMT 102/103. - никаких кнопок. Поставили руль в центр, подали питание на ODrive, мотор провернется влево-вправо и готов к работе - регулируемое усилие по стопам на краях диапазона и зона в которой будет нарастать усилие при упоре(антимолоток на упоре) - собственно результат наибольшей е...ни - отсутствие затежеления руля при подаче питания - переключение в режим DFU из UI Протестировано на одноосевом ODrive, ODESC3.6, и на двухосевом ODrive. Но отсутствие багов не гарантирую, так что тестируйте пишите что найдете. P.S. Документация по всем настройка будет позже. Крутите параметры P Gain и I Gain по чуть чуть кто понимает что это. Output Power Limit тоже добавляйте по чуть чуть и тестируйте стабильность работы.1 балл
-
Тема не умерла. Но работаю над вариантом с инкрементальным(он показывает себя гораздо лучше хоть и городить сложнее). Один я даже как-то запорол. Между и питанием и землей КЗ. Может кто разбирается почему такое может быть? Я его разобрал там минимум деталек, может кто понимает как найти у кого пробой кого перепаять?1 балл