dvkokh
-
Постов
38 -
Зарегистрирован
-
Посещение
-
Победитель дней
2
Тип контента
Профили
Форумы
События
Магазин
Весь контент dvkokh
-
Спасибо) Лепестки и баттон бокс в планах, скоро прилеплю) На видео заметно что он есть, но на деле совсем не ощущается, играть комфортно.
-
Всем привет. Доделал свой DD на pik12-3, опять же Диме @Beg спасибо за то, что подтолкнул меня собрать дд, можно даже сказать пнул)
- 730 ответов
-
- 7
-

-
- mmos
- direct drive
- (и ещё 2 )
-
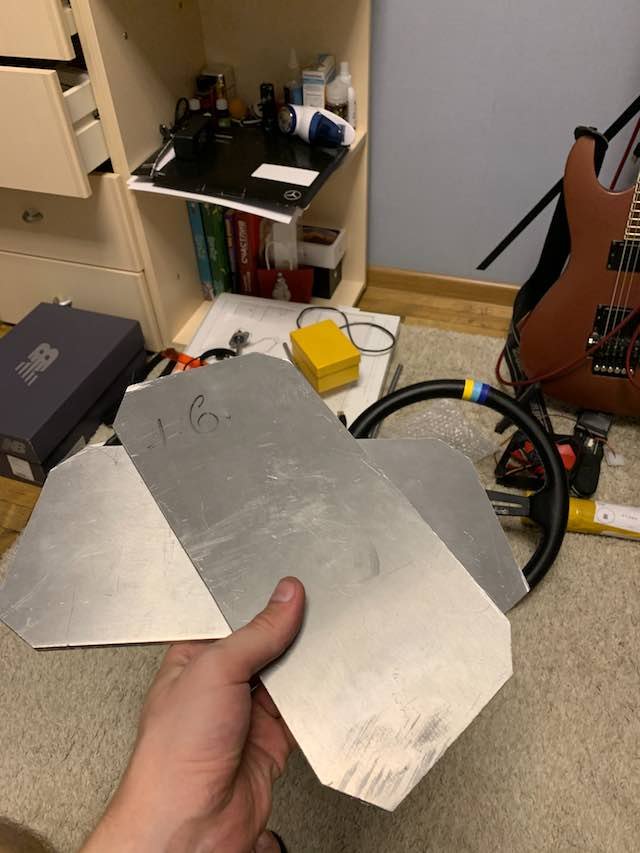
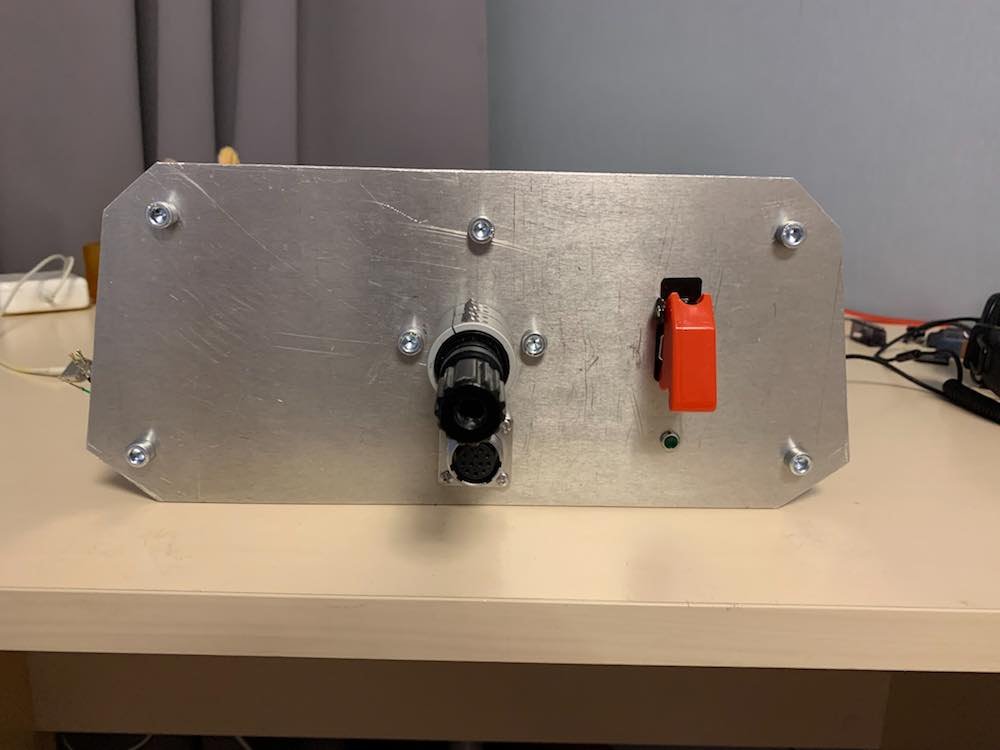
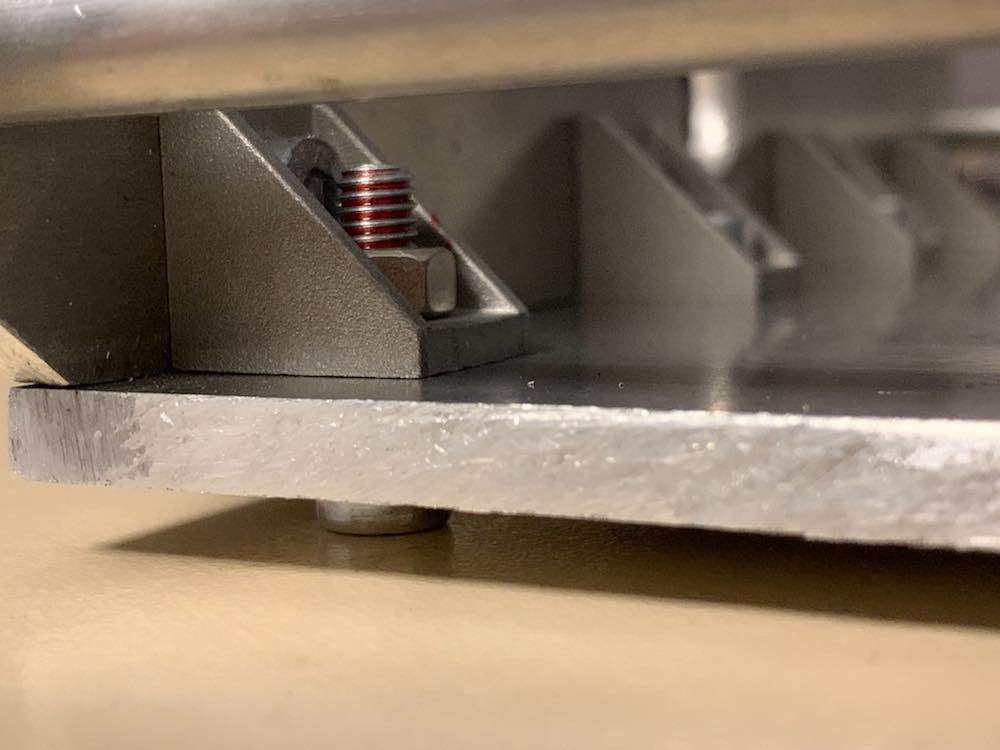
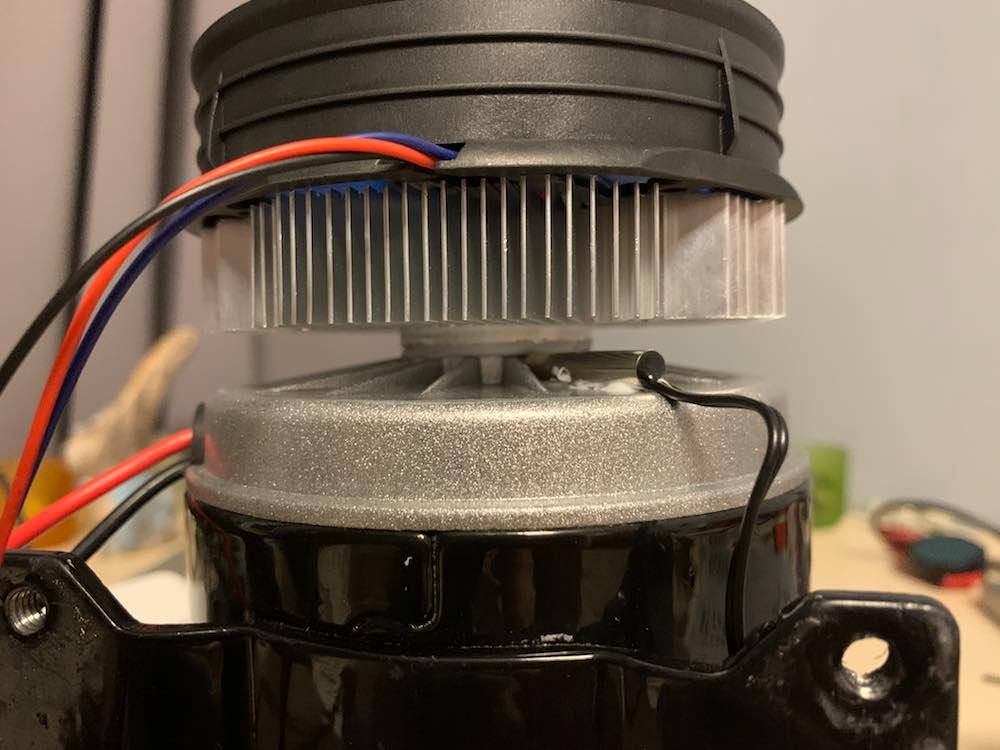
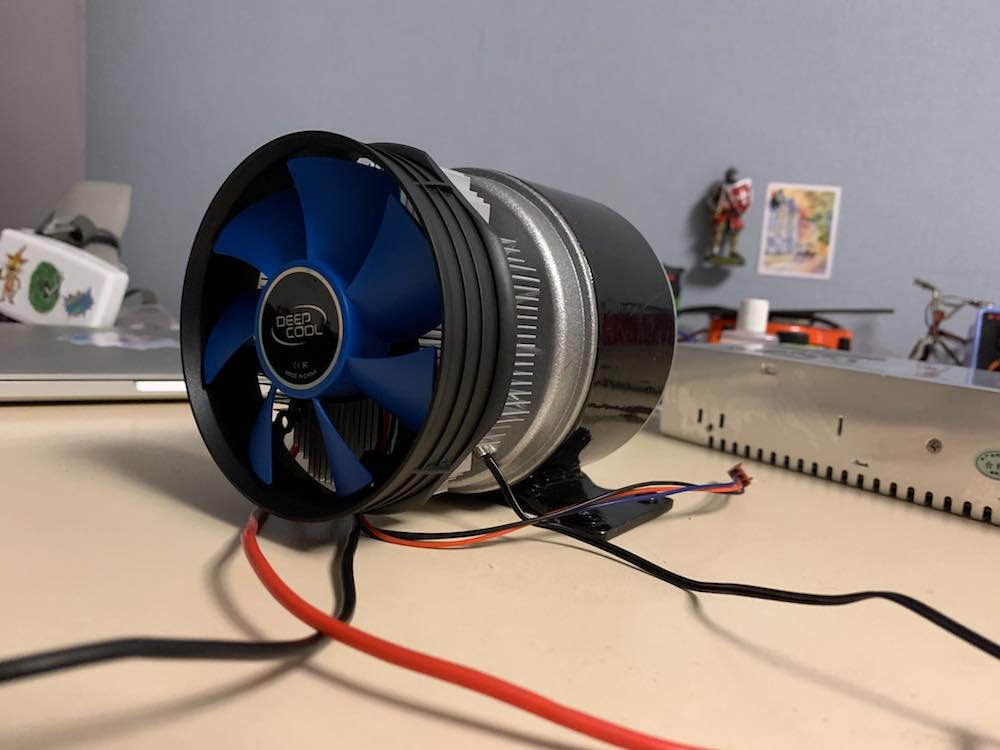
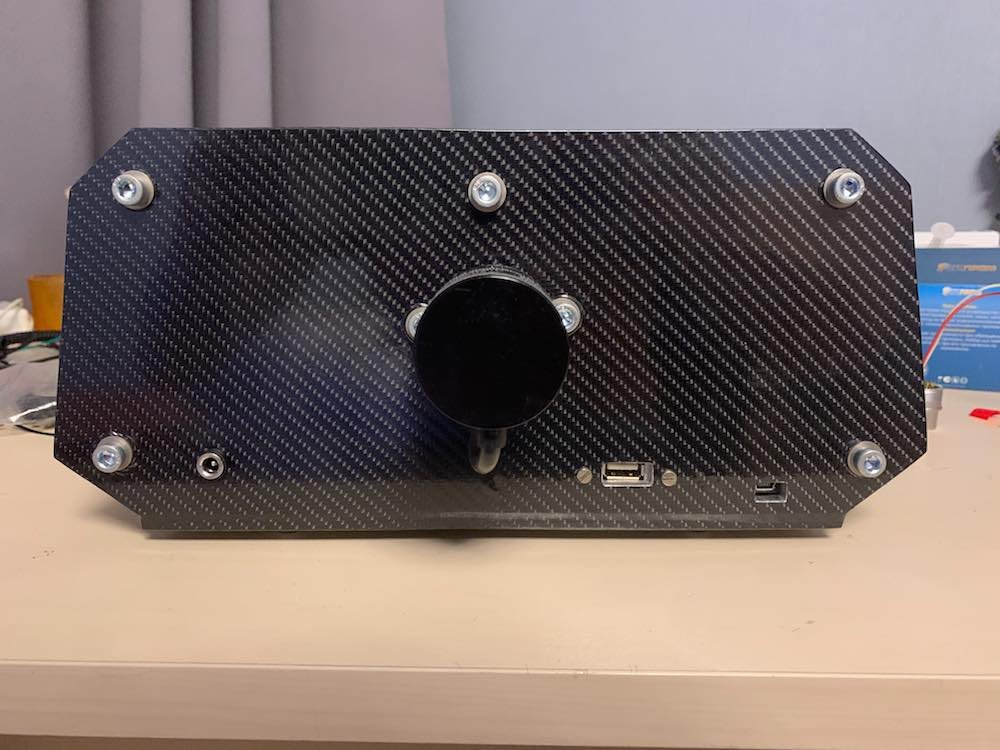
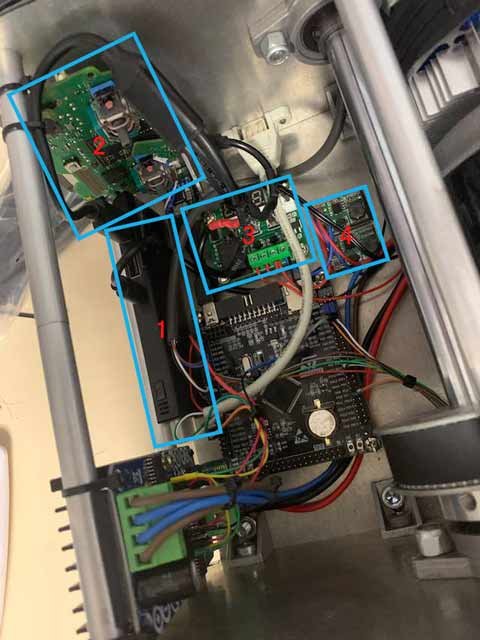
Всем привет. Базу дособирал, поэтому хотелось бы немного похвалиться своими трудами. Всем спасибо за помощь и советы, они очень пригодились. Отдельная благодарность Дмитрию @Beg за помощь с настройками и тестированием. Перед постройкой я насмотрелся очень много примеров самодельных баз и решил остановится на чем то среднем. Плюс тк у меня нет ПК, то база должна была работать с Playstation 4, хотя я с самого начала не был уверен на 100 процентов что она заведется с плойкой. Изначально нарисовал примерный вид базы Потом чуть изменив размеры выпилил стенки из 6мм алюминиевых АМГ2 пластин Скрутил с помощью болтов м6 и алюминиевых стержней Насверлил отверстий и примерил вал толщиной 12мм, тумблер и разъем для кнопок на 12 контактов Выпилил основание базы и прикрутил на алюминиевых уголках такими же болтами м6 с фиксатором резьбы Потом поставил мотор MY1016 и всю электронику. Для мотора, кстати, в качестве охлаждения идеально подошел процессорный кулер на 90мм, который я приклеил к мотору термоклеем Алсил 5 - приклеился намертво Этим же клеем прилепил термодатчик который работает через китайский контроллер. Кулер включается когда мотор нагревается до 40 градусов и выключается на 33. По итогу его конечно не хватает чтобы полностью охладить мотор, но температуру удерживает где-то на 36-37 градусах. Оклеил базу пленкой под карбон и окончательно всё собрал. Изначально энкодер я вынес за корпус, чтобы сделать базу более компактной. Сзади разъём для подключения питания, юсб для педалей и мини юсб для подключения к PS4 Внутренности в собранном виде выглядят так И на электронной части хотелось бы остановиться поподробнее. Почему там столько всего лишнего кроме STM и BTS. Думаю кому то инфа будет полезна. Т.к. я собрался подключать базу к PS4, то единственный способ это сделать - подключить её через GIMX. Особенностью GIMX является то, что для его работы требуется полноценный ПК. Ставить системный блок или ноутбук рядом, что бы поиграть с рулём на PS4 такое себе, поэтому было найдено следующее решение. 1. Микро ПК Intel compute stick на Win 10 (intel Atom, 2гб оперативки). К нему подключены STM и GIMX адаптер. Приобрел БУ на авито за 3к . Сама программа GIMX автоматически запускается скриптом при включении. 2. Материнская плата от Dualshock 4 подключенная к микро ПК. Для работы GIMX требует постоянного подключения геймпада, почему он работает именно так - хз. 3. Термо контроллер для мотора 4. Две понижайки вольтажа. С 24 до 5в для микро ПК и с 24 до 12 для термо контроллера. Всё включается одним переключателем. Чтобы PS4 увидела руль приходится ждать пару минут (пока всё загрузится). Работает всё отлично, PS4 думает что к ней подключен Logitech G29. И еще кое-что хотелось бы добавить. По итогу чувствуется еле заметная ступенчатость и виной тому в первую очередь скорее всего зубчатый ремень, если медленно крутить руль, то чувствуется как перескакивают зубчики. В будущем наверное буду делать DD на моторе постоянного тока.

-
Смеха ради, но из стула из икеи получился вот такой кокпит. Кстати довольно удобно. Пока не сделал себе нормальный - катаюсь так)
-
Еще вопрос и еще забыл добавить, при min force выкрученном на максимум тест step log проходит нормально.
-
Я вроде не глупый да) Но до конца не разбираюсь в вопросе, это вообще мой первый опыт постройки чего то подобного. С одной стороны вроде всё просто, а с другой стороны есть куча нюансов, в которых тоже хотелось бы разобраться, поэтому я и спрашиваю совета. Подкрутив значения min/max force заработало и без 5v, только без 5v поведение немного другое, вчера было мало времени потестировать и так и так, до конца еще не понял как лучше, но ощущение что без 5v feedback не такой острый, зато мне больше понравилось, что руль лёгкий когда нет никаких эффектов. Еще странно начал вести себя тест Step log 2, во первых он иногда долго думает прежде чем запуститься, во вторых он сначала как бы крадется до определенного уровня и только потом начинает возвращаться на место, и то руль во время теста возвращается не в центр. То ли я в MMOS tool что-то не то накрутил, но есть подозрение, что новые бтски еще хуже старых.
-
Советы и инструкции принял, буду копаться в настройках. Бтски заказанные с али приказали долго жить после тестирования разных настроек, хорошо что достались бесплатно. Как куплю новые буду тестировать ещё.
-
Ребят, нужна помощь
-
Со всеми проблемами разобрался, всё заработало при переподключении stm32 к пк. И в видео я говорил о том, что захватывается вторая ось, проблема была в том, что провод этой оси небыл ни к чему подключен, вообщем теперь всё работает идеально.
-
Протестировал
-
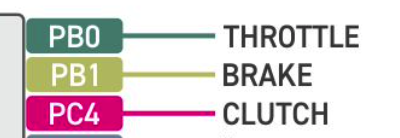
Педаль от BMW работает и, вроде, вполне адекватно себя ведёт без конденсаторов. Цена вопроса 1000 руб. Наверное пойду на разборку за еще одной педалью, вытащу оттуда датчик холла для педали тормоза. Единственный момент, подключал всё по схеме, но контакт который идет на PB0 никак не реагирует на педаль. На PB1 работает нормально. С проводами и подключением всё порядке. В чем может быть проблема? И еще вопрос, есть какая нибудь программа чтобы потестировать оси? Посмотреть доходит ли уровень до 100 процентов при полном нажатии на педаль.
-
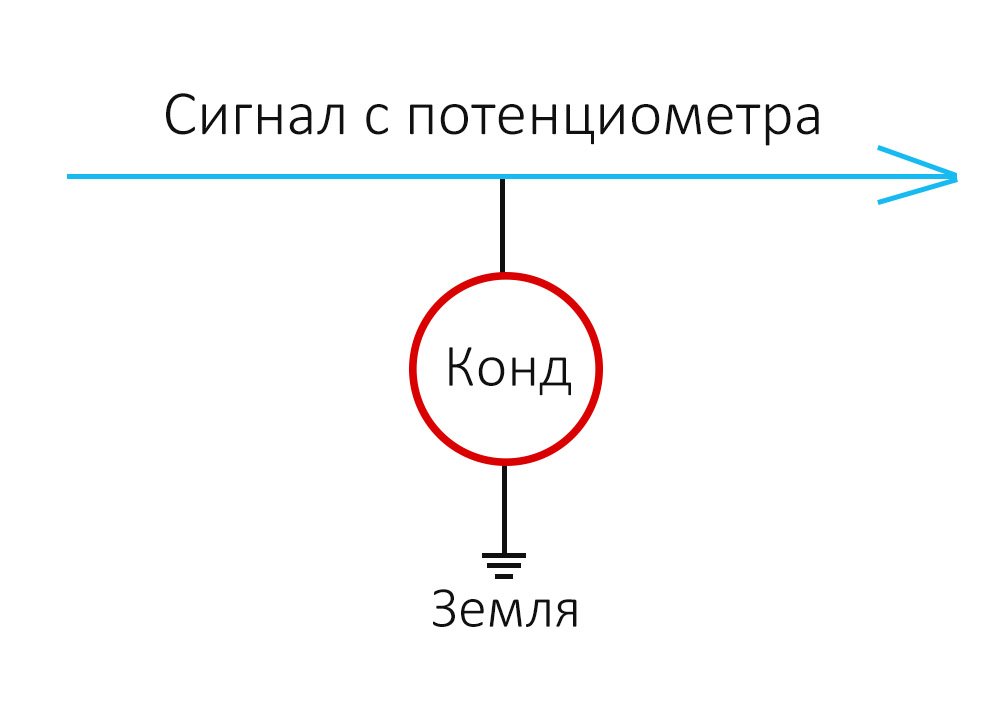
@FSUP Надо тоже поэксперементировать, понять как лучше. @Basma4 Извиняюсь за глупые вопросы, но пока плохо разбираюсь в схемах... Я правильно понял, что конденсатор с выходного сигнала ставится вот так? Т.е. провод с выходным сигналом как шел так и идёт, просто к нему сбоку припаивается конденсатор?
-
@Basma4 Я правильно понимаю, что на потенциометр/датчик холла нужно кидать 5в, а выходной сигнал уже к контактам PB0/ PB1 на плате? Купил на разборе электронную педаль газа от BMW со встроенным датчиком холла, хочу попробовать подключить, но она на выходе выдает от 0,5 до 4,5 вольт, надо будет смотреть как она себя поведет. @FSUP А как лучше? По сути если топить в сторону реалистичности, то руль и должен быть немного туговат в простое, если сравнивать с авто с ГУРом, на авто с электро усилителем полегче конечно руль.
-
Вот подстава, я думал может хотя бы с датчиками холла stm нормально будет работать. Потенциометры не хочется ставить, хотя я так понимаю с ними тоже всё плохо. Вроде ферритовые кольца частично помогают решить эту проблему. Есть ещё способы побороть дерганье? Например повесить педали на контроллер, а контроллер уже цеплять к STM? Нашел гайд по фильтрации шумов с аналоговых датчиков. Работает на ардуино. Надо будет попробовать. https://alexgyver.ru/gyverfilters/
-
Коллеги, кто-нибудь подключал педали на датчиках холла к STM32? Как они себя ведут? Будет ли это вообще работать?
-
@Beg конденсаторы не ставил и, наверное, не буду, хочется как можно компактнее сделать. Но если новый блок питания будет так же себя вести, то, видимо, придется. @Basma4 как раз сейчас поеду за подобным на 20А
-
@Buxou У меня валяется где то на 600 ватт от старого компа, но он 12в, хотелось бы 24, говорят фидбек повеселее работает. Куплю ватт на 500, надеюсь этого хватит. На серверные что-то ценники огромные, не хочется столько денег тратить на блок питания.
-
Вообщем всё работает с одним жирным НО. При включении некоторых тестов тухнет блок питания, помогает выдернуть его из розетки и обратно включить. В чем может быть проблема? он просто не вывозит получается? Мотор на 300вт, блок питания китайцами был заявлен на 350... еще за него и переплатил чтобы в корпусе был.
-
@Beg Премного благодарен. BTS на чипах GAC913 вроде нормально работают, но по твоему совету всё-равно сделал возврат средств на Aliexpress, сразу закрыли спор в мою пользу. Сегодня вечером буду тестировать руль, уже потом точно смогу сказать насчет этих BTS.
-
Ребят, подскажите, есть ли какая-нибудь программа в которой можно force feedback потестировать?
-
Для кого то будет полезна информация. Самодельный руль работает с PS4. На видео Gran Turismo Sport. Что с отдачей пока не ясно, тк не доделал базу, но тоже должно всё работать.
-
Кстати, тут как то спрашивали про подключение самодельных рулей к Playstation 4 - практически получилось подружить руль с приставкой через GIMX. Приставка видит руль, даже в Gran Turismo Sport рулится немного - буквально 2 секунды, потом STM отваливается от ноутбука с сообщением "Энергоемкое устройство было отключено". Причина не ясна, но скорее всего потому что пока это всё работает через костыли - GIMX запущен на Windows, который в свою очередь запущен на виртуальной машине на макбуке. Думаю нормально заведется когда пересоберу GIMX адаптер на Raspberry Pi.
-
@Beg Спасибо! Пол часа вчера тыкался в этом разделе, так и не разобрался. И еще вопрос) Пробовал ли кто нибудь шить STM прошивкой SimuCube? Работает она с контроллерами BTS? В обзорах говорят ffb поинтереснее работает на этой прошивке. Доступна по этой ссылке https://github.com/SimuCUBE/Firmware-Releases
-
Понял, спасибо. Ещё такой вопрос, по умолчанию у руля выставлены обороты на 540 градусов и когда в утилите выставляешь, например, на 900, то после закрытия утилиты всё сбрасывается. Как сделать чтобы stm запомнила настройки?
-
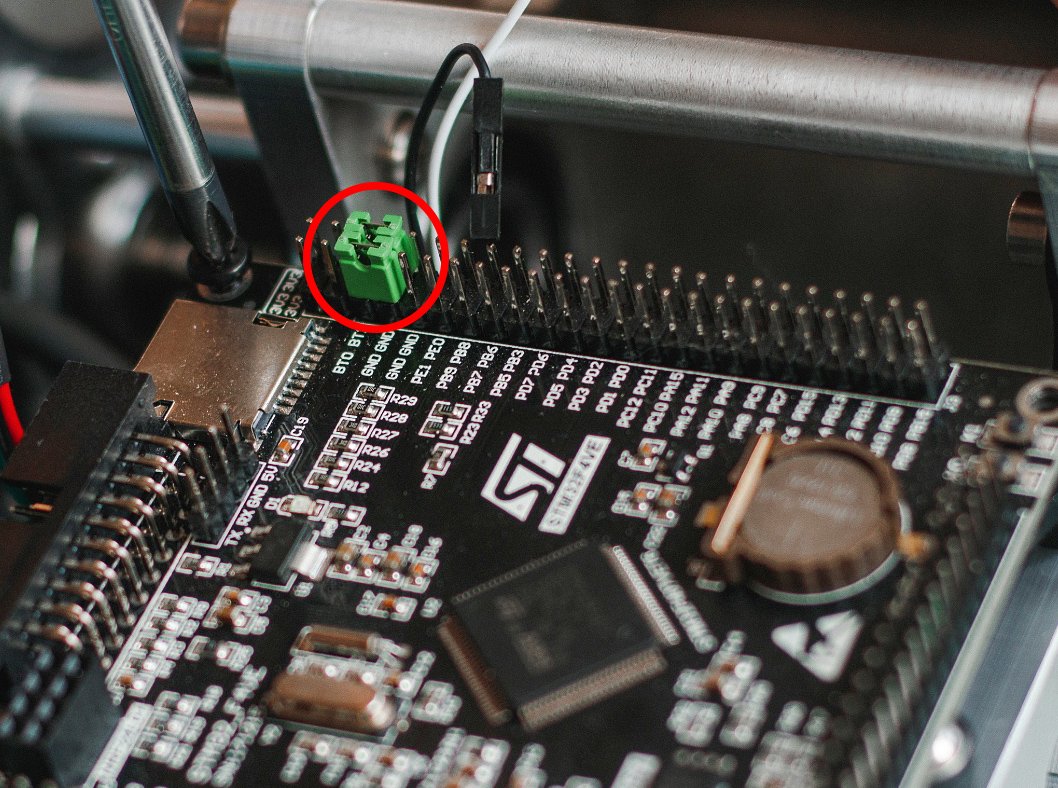
Товарищи, поясните для чего эти две перемычки стоят на STM32? С али пришла плата без них, и диод на плате горит красным, а не зелёным, то ли ревизия такая, то ли левак. При этом нормально прошилась (пришлось кохозить перемычки из проводов) и нормально работает без перемычек.