stasdelmar
-
Постов
23 -
Зарегистрирован
-
Посещение
-
Победитель дней
1
Тип контента
Профили
Форумы
События
Магазин
Весь контент stasdelmar
-
я заказывал тут https://aliexpress.ru/item/1005003374470009.html
-
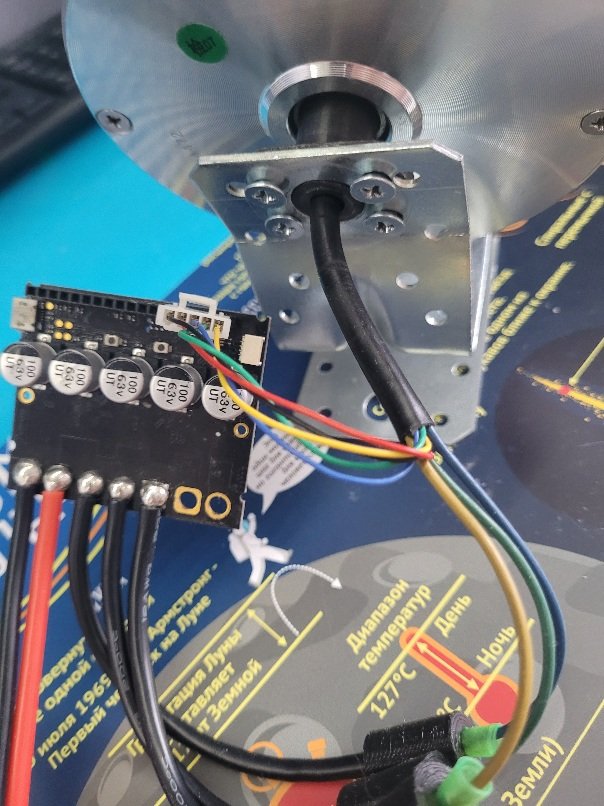
Питающие провода на этом фото отсутствую, снимал для сверления центра вала под AS5147. После сверления провода вернул обратно как было по заводу, в термоусадку, и на стяжку к одной из опро статора, чтобы не подцепить болтами крепления быстросъема рулевого колеса. Болты там на полвитка торчат внутрь мотора. Термоусадка примерно на треть-половину закрывает провода обмотки после места пайки. Шум по типу "песка в подшипниках" на моторе я замечал. Попробую убавить, и поискать значения, поделюсь результатами. Соотношение между P и I как-то рассчитывается? Похоже что там может быть зависимость.
-
Да уж, многовато. Пока поставлю 5% Я собрал на коленке ту схему на операционнике, уходы в защиту на моем прошлом блоке (18В 6А) прекратились. Он спокойно выдерживал лимит в 27% мощности, дальше по перегрузке отключался за крайними положениями "Soft stop". Не понятны причины, но если я ставлю свой слабый БП (18В 6А) провалы координат и FFB прекращаются. На Блоке 24В 400W отвалы произвольные по частоте возникновения и длительности (от 0.1 сек по ощущениям как мелкий удар в руль до примерно секунды, как полное зависание). Причем в контроллере при этом по всей видимости процессы не останавливаются и при "отвисании" координаты в игре становятся как накрутил руль и сила на руле возникает как будто я его до этого места докрутил мгновенно, иногда очень сильные удары, естественно полная потеря машины в игре. Вопрос, это могут быть помехи от самого блока в шину USB? Магнитов всего 20, катушек на статоре 18. Похоже нет ошибки. На что стоит обратить внимание при этом изменении? То есть что изменится, чтобы понимать, повлияло изменение или нет?

-
Отчитываюсь об ошибках. Хаотично, не систематично отваливается связь с контроллером (USB отвалов нет, но перестают передаваться координаты, зависает FFB). Тормозной резистор разогревается как кипятильник на полностью стоящем руле, при этом блок питания достаточно разогревается. т. е. ток просто "без тормозов" идет в тормозной резистор. Конфиг: ODESC3.6 БП 24В 400W, резистор 0.5Om 50W. Есть защитный диод и резистор на IRF3205 2Om 25W на операционнике. Колесо мелкое, 5" мощность 250W магниты 20мм. Энкодер 1000PPR через шевронную передачу 1:4 = 16000CPR. Экспериментально подобрано 10 полюсов (при других значениях руль не стабилен, защёлкивается) Лимит мощности поставлен в 40%. Тормозной лимит 10% За полчаса в AC до мотора не дотронуться, но играть невозможно, из-за зависаний.
-
Как я понимаю, автор педалей рекомендует использовать FreeJoy на C8T6. При этом для подключения LC вход используется аналоговый с усилителя (ina122). Вот вопрос, а в принципе mmjoy, freejoy, OSH вообще содержат библиотеку для HX711? Упоминания такого не нашел, поправьте, если не прав. (По поводу 80Гц и даже 10Гц на датчиках мне не критично вообще - ETS2 не такой быстрый сам по себе...). Конвертер промежуточный на "типа arduino" вставлять между HX711 и тем же freejoy не вижу большого смысла тоже, хотя для экспериментов при наличии всего кроме усилителей на операционниках можно и попробовать, но профит ИМХО минимален.
-
Есть в наличии БП 24В 400W для LED. Пробовал от него подключать руль. Нормально. https://aliexpress.ru/item/32827458400.html Точно такой же но на 150W питает ленту светодиодную. При димиировании ленты внешним блоком типа WLED блок пищит ощутимо слышно.
-
@propeler, а подскажите как на ODESC3.6 найти те разъемы куда можно зацепить "руль" по SPI Slave? На двухмоторной плате есть контакты с обозначением SPI, а на одномоторной только GPIO1-8 обозначены. Может на них где-то можно?
-
А по схемотехнике и набору компонентов из имеющихся может кто подсказать? Диод нашелся SR2060 Мосфет IRF3205 А операционник TL071 Сам тормозной резистор смог найти только 2Om-25W. Стоит пробовать собирать на таких элементах? По поводу питания операционника написано +12 если его питать от основного V+ всей схемы например до диода по входу? Там типа 18-24В будет, для ОУ до 36 по даташиту. Может нужно какие-то сопротивления поменять R1-R4?
-
Педали как я понимаю сюда не предусмотрены, КМК. А вот про кнопки тоже интересно. Была информация про поддержку рулей TrustMaster.. эмулятор которых делается достаточно тривиально на протейшей pro mini. Тоже хотел бы взбодрить эту историю.
-
Совершенно глупый вопрос, но вдруг. @propeler нет ли случайно в планах программного ограничения потребления электроэнергии? Суть вопроса: можно ли программно ограничить ток, чтобы в пиковые моменты блок не уходил в защиту по "КЗ"? Когда плавно нагружаешь руль можно из блока питания вытянуть достаточно много (руками уже не крутится), но бывают резкие перекладки, и вроде на руках не ощутил такое усилие, а блок ушел в защиту и контроллер отключился, а потом быстрая калибровка в положении где был повернут руль... Снова вкл/выкл для правильно положения руля. Блоки не 9А, но на 4А и 6А почти одинаково выбивает. Резистор впаян, тот что был в комплекте. ... Спасибо всем, кто подсказал про контактные площадки. Контроллер снова живой.
-
А можете показать какие это пятки? Вчера разъем отпал при попытках его немого закрепить. Он не залуживается по корпусу, поэтому пайка ушей его бесполезная трата времени. Пока пытался припаять другой разъем (уже луженый) перегрел дорожку D+, отошла. В общем потерял USB связь. Если у кого-то есть layout по плате или ее схема, можете поделиться? Бегло по поисковикам не нашел ничего кроме рекламной картинки, плата ODESC3.6.
-
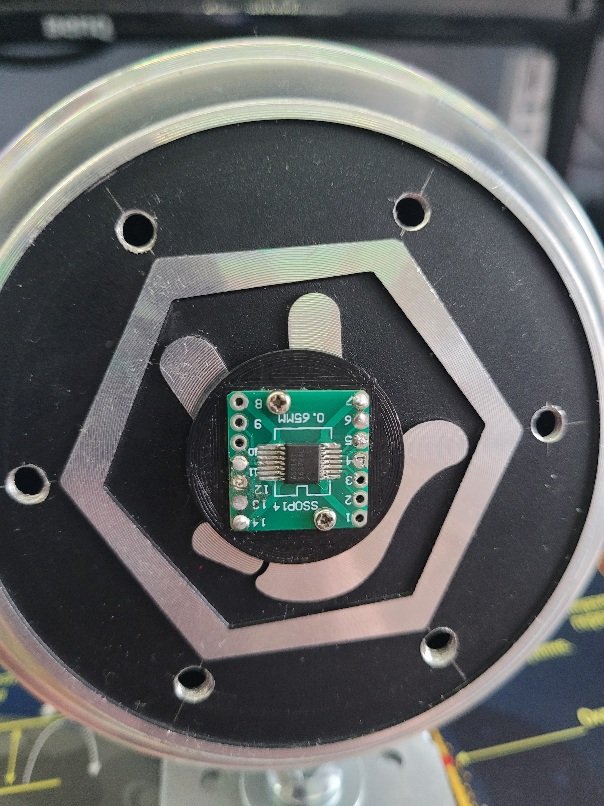
Сейчас AS5147 магнитный в подключении ABI (инкрементальный). По дефолту "I" заглушен. Да. Действительно лучший припаяю провода и вынесу разъем отдельно, пока не оторвал дороги. Спасибо за наводку. Упомянутый мной БП есть в наличии, хвост отрезать ему жалко хочу найти оригинальный разъем... 100W после моих тестов на 17W уверен будет "за глаза".
-
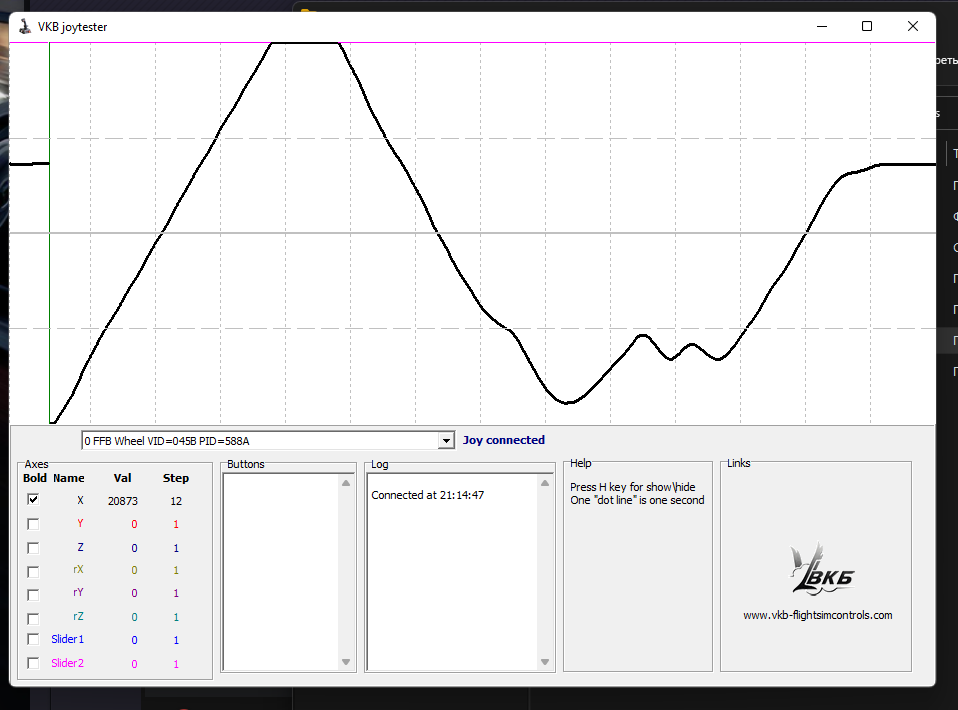
Впечатления не передать!!! ETS2 проезд препятствия, как реальный. Трык-трык, на кочке. Удар жесткий четкий. Симуляция резонансы мотора - игрушечная, но вибромассаж великолепный. Блок питания мощный пока не подключал. На 9% эффект от возврата руля и тяжести на маленькой скорости (при парковке) очень заметный, красиво передается, но пока не очень сильный. Пробовал на блоке (не смейтесь) 12в 1,5А на 10% уже уходит в защиту БП Блок поменяю на Мак минивский 110вт 18.5в 6А но боюсь за стол и крепление мотора и руля... А еще, кто как победил microUSB разъем на ODesk3.6? Он очень хлипкий, я его ушки подпаивал, но они от тряски опять разболтались и отошли. P.S. эффект защелки пропал, когда правильно подобрал количество Pole pair. У меня экспериментально нашлось 20. Выяснял меня на 1 и проверял эффектом Force Spring. При не корректном количестве полюсов на некором углу всегда разном на разном количестве полюсов просто полностью теряется тяга в моторе, и мотор как будто в мертвую зону уходит. Естественно всякие провороты, и убегания. После подбора полюсов оказалось что нужно инверсию включить, так как вместо упоров срабатывали срывы в безостановочное кручение мотора, обратное по направлению к упору. Мой короткий видосик с работой силовой пружины: https://disk.yandex.ru/i/gIJjbbiSkG4O6w А вот так закусывало по краям рабочей зоны с неправильным количеством полюсов и направления энкодера. https://disk.yandex.ru/i/ykqaMtp3BGhw9g
-
Странные ощущения. Прошил, подключил... что-то не то показывает... Разобрал, просто поднес магнит и оно задвигалось... Короче китайские товарищи посылают не правильные магниты. Поставил его (магнит) поперек, и всё заработало. Конфиг сейчас: мотор 5", ODesk3.6. Энкодер AS5147 в схеме включения ABI. SPI подтянут на землю и VCC по даташиту. ничего не прыгает, зубов не видно, точность и четкость мне очень нравится (сравнить не с чем). Компактность сохранилась, оптический энкодер приехать не успел. P.S. В крайних положениях руля ограничитель срабатывает как защелка. Не понятно как с этим жить... P.P.S. Запустил ETS2 отдача есть, но как будто пропадает на некоторых углах.. типа около 15, 30, 45, 60 градуса (не точно). Предполагаю есть электонно-магнитная зависимость...
-
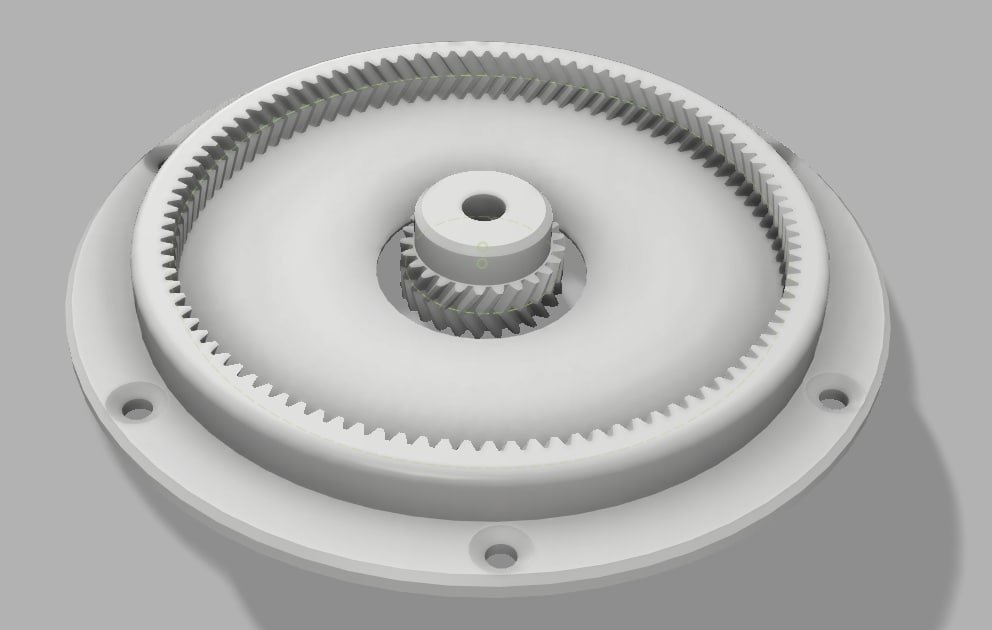
Это сообщение относится к старой версии прошивки. Новую ещё не загрузил, в отъезде. Также жду пока приедет инкрементальный энкодер. На свой мотор смоделировал только передачу, не печатал еще. Может откажусь от шестерёнок в пользу прямого привода.
-
Роман, а какой энкодер предпочтительнее ставить в схему из оптических по типу OMRON-a? Есть 4 модификации по выходу с экодера (NPN oc, PNP oc, Voltage, Linear Driver) https://eu.mouser.com/datasheet/2/307/e6b2-c_ds_e_6_1_csm491-1670028.pdf . Если я правильно понял то предпочтительно выбирать NPN oc, то есть модификация CWZ6C ? Разрешение на оборот как определить лучше? Передаточным отношением мотора и энкодера можно поиграть при моделировании пары передачи, по типу как тут. (Не моё фото)
-
У меня пока не работает, снова жду детальки, или возможно попробую прошивку на абсолютном энкодере, как у @propeler в ранних версиях. Правда там, как я понял в прошивке что-то не так. Уж очень не хочется городить с оптическим. Ну, а главное слово, конечно же, за автором.
-
Поделюсь своим маленьким опытом. Что-то пошло не так. Фейл 1. Заказанные TLE5012b оказались E3005 модификации. Выход кроме SSC у них не ABI, а HSM (эмуляция датчиков холла примерно как в самом моторе были). Сменит выход на IIF можно но только по SSC интерфейсу. После снятия питания конфиги не сохраняются. Итог перезаказал на E1000 с преконфигом IIF. Электронику и печатку не ставил, не проверял, адаптер не печатал. Фейл 2. В свою очередь AS5147 распаял, держатель распечатал, проводки подпаял, выход SPI на питание и землю подтянул по даташиту. На выход ABI повесил ослик и там вместо квадратурного сигнала энкодера - что-то отдалённо напоминающее ШИМ при повороте руля скажность меняется. Выход I(pwm) как я понял тоже заглушен программно и включается по SPI. Подключение к ODesc3.6 на входы ABZ для прошивки с гита (последней по дате) никаких подвижек курсора в joy.cpl что логично, не дают, ответа в мотор тоже нет, естественно. Подключение абсолютных энкодеров по SPI и SSC не предполагал изначально, понадеявшись на работу инкрементального квадратурного выхода описанных микросхем фэйлов.
-
Плата ODesc3.6 пришла, прошивается на раз-два Cube программером по USB в DFU без всяких ST-link-ов. @propeler прошивка которая odrive-test на git-е ? Про энкодеры для меня вопрос открытый. Ещё не пришли AS5147 и TLE5012b, жду со дня на день. По интерфейсу AS-ки может кто подсказать, если не по SPI подключать, а по ABI нужна ли инициализация постоянно перед включением? Или по дефолту будет работать, грубо говоря по 5 (V+, A, B, I, GND) проводам?
-
Сейчас как и коллеги тут на форуме занимаюсь механикой, пока едет электроника. В тесты готов ввязаться, как что-то прибудет. Подскажите ваше мнение на счет магнитных инкрементальных энкодеров? Я планирую использовать либо TLE5012b либо AS5047p в режиме ABI (IIF). Платы их отладочные слишком большие и перегруженные, буду использовать площадку-переходник на DIP. Обвязка там минимальная, только по питанию, как я понял. Прошивать ODesc нужно будет STLink-ом? От F1Discovery подойдет?
-
Чувствую хотения желающих получить прошивку превышает возможности господина @propeler по ее написанию. Предлагаю разместить ссылку на донаты на разработку прошивки! И если мы сможем достаточно подогреть интерес, то выходные и праздничные дни могут пройти не зря. А? P.S. Уверен не открою америку, https://github.com/simplefoc что есть открытые наработки. Если уж не включить, но подглядеть алгоритм для направления разработки можно попробовать. А сам много понял из этой статьи https://habr.com/ru/company/npf_vektor/blog/367653/ , думаю многим будет понятно почему разработка прошивки тут не тривиальна и не проста.
-
Приветствую! Очень случайно попал в тему. Колесо заказл на авите, odesk 3.6 на али. Уже всё едет. На pro micro уже зашит mmjoy2. Веселюcь пока с потенциометрами. Возник вопрос, даже не смотря на ответы в теме, есть недопонимание по определению положения руля в пространстве. Так как подача тока в мотор (FFB и FOC) и передача сигнала в комп (Joystic) (вероятно это только мое предположение) завязаны на энкодер то выбор его не просто так оказался проблемой, и сложности в прошивке скорее всего из-за алгоритмов их работы. Так вот учитывая широкий выбор этих самых энкодеров вопрос то вот в какой у меня. Может для упрощения выбрать один, просчитав все за и против? Инкрементальный оптический (A,B, (Z?)), - по типу OMRON Инкрементальный магнитный, (ABZ) - например AS5047P или TLE5012B Абсолютный магнитный (PWM, SPI, I2C) - как AS5600 или AS5048a/b Другое? И настолько ли магнитные плохо как о них говорят? P.S. Автор идеи и прошивкописатели просто огромнейшую работу проделывают. Огромная благодарность.
-
1. Станислав Лутовинов 2. Россия Томск 3. 36 4. с 2000 года 5. ETS2 6. DIY (Ремонт, мебель, электроника, 3D печать) 7. Женат, сын 8,5 мес 8. IT 9. Да 10. Поисковиком на DIY руль.

.png.16043d867eb80c5fa0af7b135e010509.png)