DarkGracius
-
Постов
57 -
Зарегистрирован
-
Посещение
-
Победитель дней
6
Достижения DarkGracius
")
Newbie (1/14)
43
Репутация
-
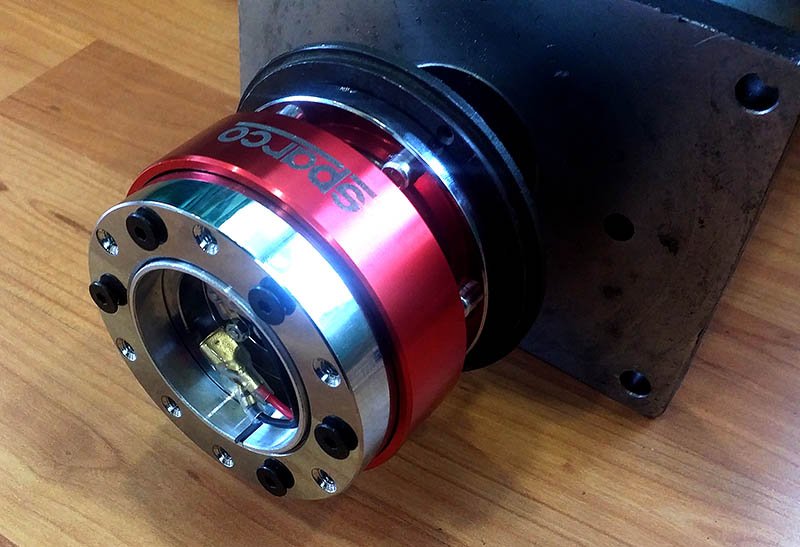
 Руль - переделка такого манипулятора как SRW-S1. У меня на нем сдохла электроника (кнопки, светодиодики, аналоговые оси, короче все, слетела прошивка pic`a, а найти ее нереал) Пришлось все тотально переделывать, спасибо твоему проекту. Заодно поменял галетники на энкодеры, и дпад на аналоговый джойстик. А сча у меня сдох контроллер педалей, и из-за того что такой мне не взять (самоизоляция, мать ее) пришлось вешать еще один STM32F103C8T6 для педалей. Первый - в руле... ну а фидбэк на MMOS... Кстати, у меня новый STM32F103C8T6 для педалей и оси норм работают (ну как норм, резисторы в педалях уже не ой и дребезг в крайних положениях идет даже на максимальном сглаживании, но в остальном все в порядке)... И в руле, брал контроллер где то полгода назад тоже оси работают.
Руль - переделка такого манипулятора как SRW-S1. У меня на нем сдохла электроника (кнопки, светодиодики, аналоговые оси, короче все, слетела прошивка pic`a, а найти ее нереал) Пришлось все тотально переделывать, спасибо твоему проекту. Заодно поменял галетники на энкодеры, и дпад на аналоговый джойстик. А сча у меня сдох контроллер педалей, и из-за того что такой мне не взять (самоизоляция, мать ее) пришлось вешать еще один STM32F103C8T6 для педалей. Первый - в руле... ну а фидбэк на MMOS... Кстати, у меня новый STM32F103C8T6 для педалей и оси норм работают (ну как норм, резисторы в педалях уже не ой и дребезг в крайних положениях идет даже на максимальном сглаживании, но в остальном все в порядке)... И в руле, брал контроллер где то полгода назад тоже оси работают.
-
Ну вот у меня 2 контроллера, один для руля, второй для педалей... Открываю я конфигурялку... С каким она будет работать? У меня из-за этого похерились настройки на руле. Она записала конфиг не в тот контроллер. А файла сохраненного я не нашел. Что куда паял, не помню. Пришлось 3 часа потратить, что бы все восстановить... Вот как настраивать? Отключать на время настройки второй контроллер?
-
ну тогда и у меня вопрос по 15... а чо, там нельзя назначения на кнопки делать? И еще, как подружить два контроллера ОСН в системе?
-
GooGT, крайние выводы резистора подсоединял к GND и V3.3? Движок резистора к пину который сконфигурирован как Analog?
-
вот если честно, может туплю, но не понимаю а в чем проблема? Сейчас проскакивает ремень, но при чем тут драйвера? Как себя ведет система при большей частоте?
-
Я вижу там не предусмотрена регулировка натяжения ремня. Это не есть хорошо. Надо ее сделать хотя бы сдвигом мотора относительно основания.
-
Вообще, я бы первые тесты делал бы без баранки. С возможностью кривых бтс можно получить, например, максимальное вращение или еще что нибудь. И переломать руки или разнести базу. Как делаю я - включаю без баранки и без силового питания, пробую покачать вал влево-вправо, смотрю на показания энкодера в WheelCheck или в игровых устройствах, отрабатывается ли нормально показания. Если все норм, подключаю бп. Если все стоит на месте, не включилось ли какого бешеного вращения или еще чего, выставляю минимальные значения форса и гайнв, процентов по 25 и спринга также, угол руля градусов 450 и пробую покачать вал влево вправо. Если есть сопротивление пружины, т.е. вроде фидбэк работает, включаю тест Cicle в WheelCeck выставляя ползунок Saturation Х наполовину или даже меньше, что бы тест крутил не в полную силу. И вот если виилчек крутит влево вправо нормально, то можно увеличивать значения форсов и прочего и смотреть как реагирует. И только убедившись что все работает нормально, можно цеплять баранку и смотреть какой там фидбэк. Ну а если ненормально, смотреть кто работает неправильно. У меня, например при перепутанных LPWM и RPWM, начало крутить в одну сторону на постоянке на максимум. Кривая бтс выдавала такой фортель - до определенного угла поворота влево вправо вроде нормально сопротивлялось, а если перекрутить градусов на 5 больше, вдруг резко переключалась и проворачивала руль на полоборота обратно в полную силу. Так что осторожнее с тестами с рулем. При наличии на рынке кривых бтс..... А база, для кривых ручек, очень даже ничего, между прочим....))) Так держать!!!
-
Странно, мой минимум вдвое больше и весит 500 гр. (взвешивал) Кстати, придет, покажи какие у него фиксирующие элементы. Потому что поискав по али, я так и не понял как фиксируются половинки. У моего все по классике - фиксируются шариками по выемкам, намертво. а, туплю... Это же тот что на зубцах.... говорят, разбалтываются они....
-
Да, задонатить по ссылке доната в пэйпал в EMCLite и связаться с ним в фэйсбуке. https://www.facebook.com/EMCDeveloper/ Он очень отзывчивый и контактный человек....
-
Тут интересовались несколько раз чем различаются ЕМС (Ardruino Leonardo) и MMOS (STM32). Погоняв обоих хочу высказать свое мнение. ЕМС в новой версии PRO 1.00. Это недавно вышедшая последняя версия и говорить я буду в основном от ней и в чем ее отличия от MMOS. Во первых, сразу скажу что не надо у меня или кого еще просить фирмваре и утилиту от про. Она привязывается к системе и EbolzMagy высылает лицензионный файл. Так что у вас работать все равно не будет. И я считаю что 10$ (минимальный донат который просит EbolzMagy) стоят той поддержки что он делает. В чем на мой взгляд преимущества ЕМС перед MMOS, и почему я скорее всего останусь на нем, невзирая на то что у Лео, типа, слабый процессор? Во первых, проект не заморожен и EbolzMagy продолжает его развивать, невзирая на то что он утверждал что перейдет на STM32. Во вторых, у версии PRO гораздо более развитые настройки ффб чем у MMOS и его можно настроить гораздо гибче под себя. В третьих, в стоке, без всяких танцев с бубном у меня заработали педали на резисторах (в MMOS я так и не смог победить проблему с педалями, а почитав немецкий форум по MMOS, я понял что это распространненая и нерешенная проблема. Поскольку проект закрыт, и не будет решена). И самое главное, в четвертых, за что я уже люблю ЕМС PRO - это настраиваемая кривая педали тормоза. В пятых, у версии 1.00 появилаяь возможность пробросить Ardruino Nano через Leonerdo, что безгранично расширяет его возможности в плане кастомных рулей и баттонбоксов. В схеме у него уже есть вариант с двумя энкодерами и кнопками. В шестых таже самая фишка с дашбордами, но в этом я еще не понимаю что и как. В седьмых, в будущем EbolzMagy обещает поддержку SIMHUB через Leonardo..... Что касается самого ффб... Тут уже субьективно, но... По моим ощущениям ффб от ЕМС плотнее, жестче, детальнее, чем у MMOS. MMOS, такой, немного ватный, чтоли. Но это, так, в ньюансах. В принципе они очень близки и разница невелика. Теперь о недостатках. Leonardo сбрасывается при отключении питания. У MMOS есть батарейка и энергнезависимая память, он хранит настройки в себе, это плюс. У меня компьютер оставляет питание на USB при выключении и это меня не парит. Но знайте, если откючить или резетнуть Leo, как минимум придется заново выставлять угол руля и , возможно, загружать заново ваш профиль. Пару раз у меня сбросилась настройка типа шима. Не знаю с чем это связано, подозреваю, что с моим выключателем силового БП. Он искрит, собака.... При смене системы или компьютера Вам придется запрашивать новый лицензионный файл у EbolzMagy. Это время. Можно конечно пользоваться ЕМС Lite, но у нее ограниченное количество настроек (самое главное что у нее нет настроек мин/макс форс и констант). И да, фирмваре у PRO И Lite - разные. Но перешить Leo - дело одной минуты. И еще, в схеме на ЕМС перепутаны пины на LPWM и RPWM. Как и пины на каналы A и В для энкодера. И если энкодер ловится легко - данные меняются ноборот, то перепутанные пины на бтс могут доставить неприятные минуты... Когда у меня мотор включился на постоянное вращение по максимуму, я обрадовался что снял баранку на время тестов.... Вот как то так. Все вышесказанное - исключительно имхо))))
-
Теория, это замечательно, конечно.... Только у меня на базе стоит хаб... С питанием.... Да вот если к нему подсоединяется одновременно контроллер ффб и контроллер баранки на pic`e - начинает уплывать центровка руля когда катаешься в симе. Пара поворотов и руль уже поперек стоит. Оключаешь баранку от хаба - все норм. Подключаешь контроллер ффб напрямую к компу, когда баранка в хабе тоже все норм. И это и с ардруино и с стм...
-
Только у него стартовый ток 35 ампер, т.е. бп надо ватт на 500. Я бы тоже взял 895. Хотя мож у человека уже есть мотор и он прдбирает бп.
-
Ну точно его времени нет искать, но.... 1 Н.м., напряжение как я понял 8 вольт, сопротивление обмотки 0.8 ома. отсюда - https://www.torquesystems.com/dc-motors/dc-brush-servo-motor-platform-2600 вот здесь, как я понимаю подобный от 0.37 до 2.12 Н.м. http://www.industrialautomationcanada.com/cleveland-motion-mt2620-192df-pm-servo-motor-90w-0-37nm-2-12nm-wow/ классика низкомоментных серво, как я понимаю....