Поиск
Показаны результаты для тегов 'arduino'.
Найдено 3 результата
-
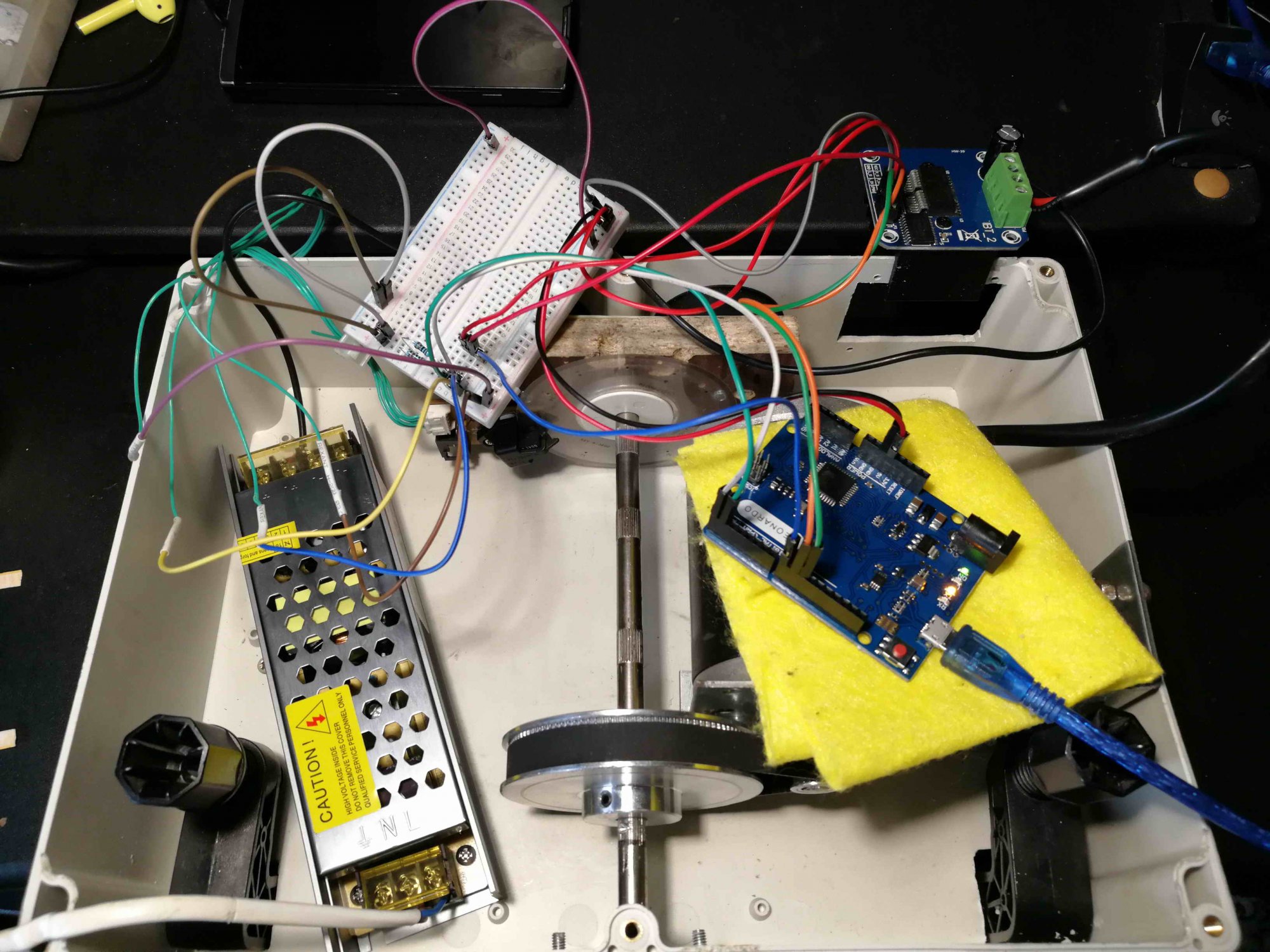
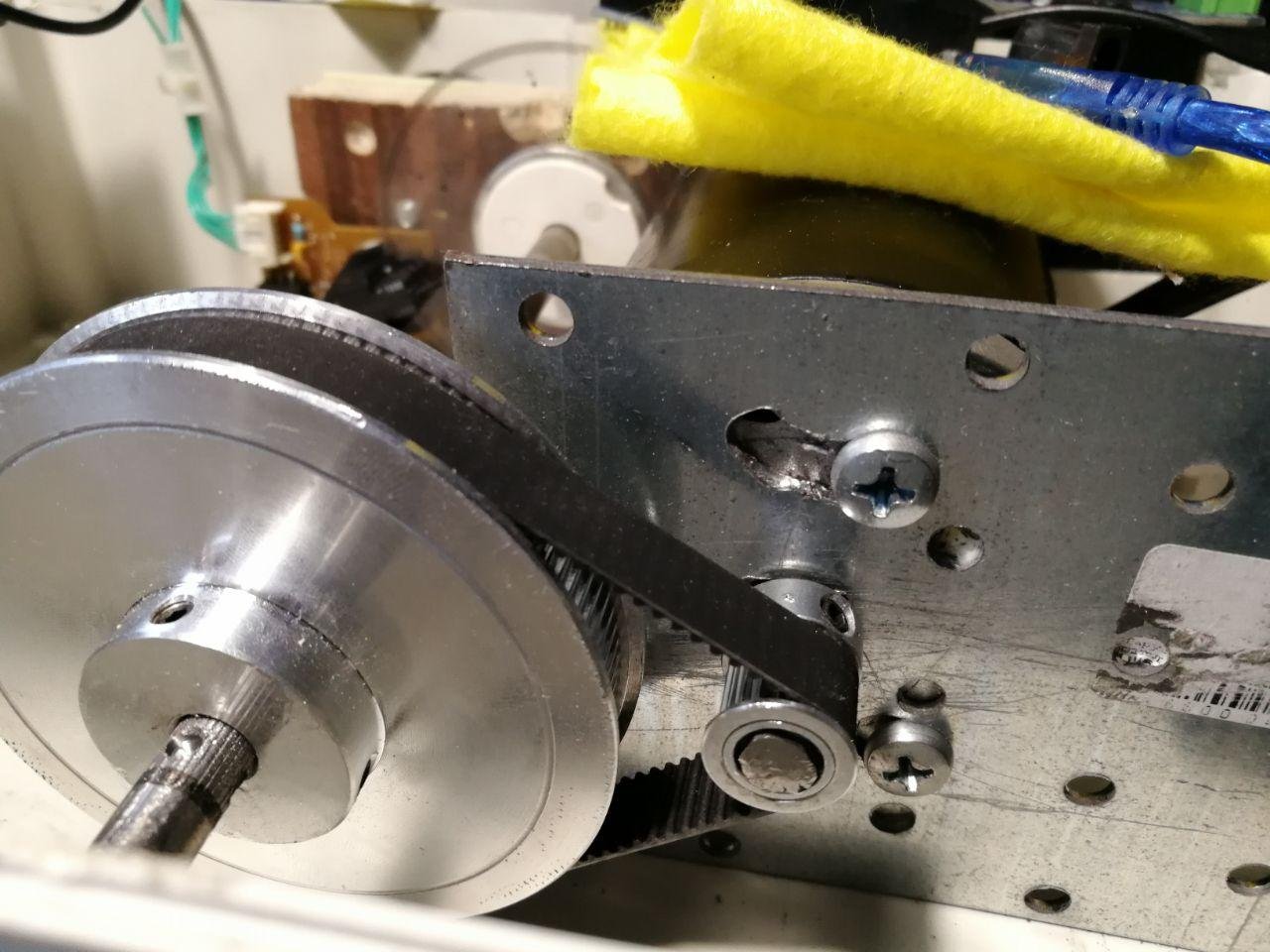
 За основу взято прочитанное и увиденное на различных зарубежных форумах. В основном руководствовался видео от Caravangoes и AgaYuditra на youtube. Для сборки было приобретено: Пластиковый короб 290х210х100. Асинхронный коллекторный двигатель 24 вольта\100 ватт. Два алюминиевых шкива GT2 в комплекте с ремнём. Передаточное отношение 1:8. Arduino Leonardo, BTS7960b и макетная плата на липучке. Всё перечисленное от завода WAVGAT. Вал 8 мм. Достал из древнего принтера HP Jet 2000. Энкодер оптический + диск к нему. Из того же древнего принтера. Струбцины пластиковые. Извлёк из никому не нужного Logitech Wingman Formula. Рулевое колесо снял с того же Wingman. Импульсный блок питания 24 вольта\4.2 ампера. Модель APS-100LN-24BM. 120 проводков с коннекторами для плат прототипирования. Заглушка от ручки замка двери Запорожца для "переднего" подшипника в корпусе базы. Первоначально для теста использовалась прошивка Ai Wave 2016. Плата исправно получала данные с энкодера, однако версия прошивки платы в момент запуска утилиты определялась через раз, либо не определялась вовсе. Дополнительные неудобства создавал мотор. При значении Main Gain 100% мотор невозможно сдвинуть с места (логично, мотор 100 ваттный). При уменьшении Main Gain появляется возможность провернуть его ровно настолько, насколько я снизил уровень Main Gain. При снижении до 80% и ниже руль становился "пустым" в середине, однако при установке Main Gain 100% руль снова возвращался в центр. Изрядно намучившись с утилитой Ai Wave, переставшей определять версию прошивки (теперь уже совсем), но по прежнему получавшей данные с энкодера, я решил от неё отказаться в пользу ПО от EbolzMagy. Вся дальнейшая работа планируется только с ней. Утилита установлена, прошивка залита в плату. Arduino Leonardo определяется как устройство ввода "EMC" с обилием кнопок (гипотетически подключенных) и осью руля. И вот теперь самое странное. Подключение энкодера от принтера я изменил согласно приложенной WIRING схеме (содержится в архиве от автора ПО). Я вижу что плата никакой информации от энкодера не получает, однако он запитан, пять вольт на него приходит, свечение в оптике видно невооружённым глазом. Мотор так же молчит. Вращение вала не встречает никакого сопротивления, показаний в утилите EMC Utility Lite нет. На текущий момент подключение выглядит так:
За основу взято прочитанное и увиденное на различных зарубежных форумах. В основном руководствовался видео от Caravangoes и AgaYuditra на youtube. Для сборки было приобретено: Пластиковый короб 290х210х100. Асинхронный коллекторный двигатель 24 вольта\100 ватт. Два алюминиевых шкива GT2 в комплекте с ремнём. Передаточное отношение 1:8. Arduino Leonardo, BTS7960b и макетная плата на липучке. Всё перечисленное от завода WAVGAT. Вал 8 мм. Достал из древнего принтера HP Jet 2000. Энкодер оптический + диск к нему. Из того же древнего принтера. Струбцины пластиковые. Извлёк из никому не нужного Logitech Wingman Formula. Рулевое колесо снял с того же Wingman. Импульсный блок питания 24 вольта\4.2 ампера. Модель APS-100LN-24BM. 120 проводков с коннекторами для плат прототипирования. Заглушка от ручки замка двери Запорожца для "переднего" подшипника в корпусе базы. Первоначально для теста использовалась прошивка Ai Wave 2016. Плата исправно получала данные с энкодера, однако версия прошивки платы в момент запуска утилиты определялась через раз, либо не определялась вовсе. Дополнительные неудобства создавал мотор. При значении Main Gain 100% мотор невозможно сдвинуть с места (логично, мотор 100 ваттный). При уменьшении Main Gain появляется возможность провернуть его ровно настолько, насколько я снизил уровень Main Gain. При снижении до 80% и ниже руль становился "пустым" в середине, однако при установке Main Gain 100% руль снова возвращался в центр. Изрядно намучившись с утилитой Ai Wave, переставшей определять версию прошивки (теперь уже совсем), но по прежнему получавшей данные с энкодера, я решил от неё отказаться в пользу ПО от EbolzMagy. Вся дальнейшая работа планируется только с ней. Утилита установлена, прошивка залита в плату. Arduino Leonardo определяется как устройство ввода "EMC" с обилием кнопок (гипотетически подключенных) и осью руля. И вот теперь самое странное. Подключение энкодера от принтера я изменил согласно приложенной WIRING схеме (содержится в архиве от автора ПО). Я вижу что плата никакой информации от энкодера не получает, однако он запитан, пять вольт на него приходит, свечение в оптике видно невооружённым глазом. Мотор так же молчит. Вращение вала не встречает никакого сопротивления, показаний в утилите EMC Utility Lite нет. На текущий момент подключение выглядит так:
-
 Всем привет Поскольку у меня нет надлежащих навыков программирования, я пытаюсь найти прошивку ESP32 для беспроводного штурвала gt3. Хотелось бы использовать матрицу из кнопок и 4-5 поворотных энкодеров. Проблема в том, что я не могу найти прошивку, которая могла бы полностью покрыть эти 2 мои потребности. https://github.com/lemmingDev/ESP32-BLE-Gamepad Я пытался сделать матрицу кнопок 4x4, используя пример из проекта выше . С помощью диодов я смог заставить все кнопки работать одновременно, но я никак не могу интегрировать поворотные энкодеры Далее я работал с готовой прошивкой https://github.com/MagnusThome/ESP32-BLE-Gamepad Матрица и энкодеры работают хорошо. Но, к сожалению, регистрируется только 1 нажатая клавиша, не более. Я думаю, что это строгое ограничение на количество нажатых клавиш можно снять, изменив какую-то переменную. Однако после ночи усердных поисков я не смог найти ее и сдался. Далее я нашел крутой проект с интерфейсом https://gitlab.com/realrobots/rr_configurator Этот проект позволяет объединить несколько микроконтроллеров в одно устройство и подключить очень и очень много кнопок и настроить все выходы с помощью rr_configurator. Я был так рад, что нашел это. С помощью этой прошивки можно использовать неограниченное количество одновременных нажатий в матрице кнопок, даже без использования диодов. Но если бы все было хорошо, то я бы не стал просить у вас прошивку. К сожалению, у меня, как и у некоторых других людей, возникают проблемы с повторным подключением. Я не буду утомлять вас подробностями Я также пытался настроить другие прошивки, но всегда появляется какая-то неприятность, которую я решить не в силах. Я думаю, что я проклят Может быть кто-то умеет у себя руль на ESP32 и поможет найти мне прошивку Или подскажите, где можно найти людей, которые "незадорого" помогут найти в первой прошивке это ограничение и снять его Также, может быть кому-нибудь пригодятся эти ссылки в своих проектах)
Всем привет Поскольку у меня нет надлежащих навыков программирования, я пытаюсь найти прошивку ESP32 для беспроводного штурвала gt3. Хотелось бы использовать матрицу из кнопок и 4-5 поворотных энкодеров. Проблема в том, что я не могу найти прошивку, которая могла бы полностью покрыть эти 2 мои потребности. https://github.com/lemmingDev/ESP32-BLE-Gamepad Я пытался сделать матрицу кнопок 4x4, используя пример из проекта выше . С помощью диодов я смог заставить все кнопки работать одновременно, но я никак не могу интегрировать поворотные энкодеры Далее я работал с готовой прошивкой https://github.com/MagnusThome/ESP32-BLE-Gamepad Матрица и энкодеры работают хорошо. Но, к сожалению, регистрируется только 1 нажатая клавиша, не более. Я думаю, что это строгое ограничение на количество нажатых клавиш можно снять, изменив какую-то переменную. Однако после ночи усердных поисков я не смог найти ее и сдался. Далее я нашел крутой проект с интерфейсом https://gitlab.com/realrobots/rr_configurator Этот проект позволяет объединить несколько микроконтроллеров в одно устройство и подключить очень и очень много кнопок и настроить все выходы с помощью rr_configurator. Я был так рад, что нашел это. С помощью этой прошивки можно использовать неограниченное количество одновременных нажатий в матрице кнопок, даже без использования диодов. Но если бы все было хорошо, то я бы не стал просить у вас прошивку. К сожалению, у меня, как и у некоторых других людей, возникают проблемы с повторным подключением. Я не буду утомлять вас подробностями Я также пытался настроить другие прошивки, но всегда появляется какая-то неприятность, которую я решить не в силах. Я думаю, что я проклят Может быть кто-то умеет у себя руль на ESP32 и поможет найти мне прошивку Или подскажите, где можно найти людей, которые "незадорого" помогут найти в первой прошивке это ограничение и снять его Также, может быть кому-нибудь пригодятся эти ссылки в своих проектах)
-
 Вообщем решил начать делать руль ДД. Почему ДД? - Посмотрев и подумав, понял что собирать с ремнями + делать дополнительный корпус ещё сложнее, при этом денег на механизм уйдёт столько же. Комплектующие которые хочу использовать. 1. Контроллер Arduino Leonardo (650р) https://aliexpress.ru/item/32834388225.html 2. Драйвер BTS7960 43A (350р) https://aliexpress.ru/item/1999464638.html 3. Энкодер пока не знаю какой, кто может подскажите пожалуйста. Думал этот брать https://aliexpress.ru/item/32877702646.html (500р), но вроде лучше брать OMRON E6B2CWZ6C https://aliexpress.ru/item/4001109112858.html (1500р) но при этом говорят что это подделка, если смысл переплачивать? И как узнать есть индекс или нету, как с индексом выбрать? 4. Двигатель буду брать Dynamo Sliver Pik 12-3/10-3 (3500р+доставка500р), 10-1 нету или оверпрайс. Или есть ещё какие нибудь аналоги? фф сильный не нужен, уровня t300 хватит. 5. БП для пробы есть обычный от пк 300w на 12в (300р). Когда всё проверю куплю более мощный. 6. Крепление руля пока что не знаю, буду искать и можете предложить. 7. Руль для начала какой нибудь гоночный-LADA итп.. (500р) 8. ПО и инструкции буду брать от сюда https://www.kaskus.co.id/show_post/5879c1b9ded770e7728b456c/1326/- так понимаю тут схема и прошивка полностью рабочая и по ней делают. Уровень моих рук - не из попы, но чуть чуть ниже плеч, в программирование и в проф электр схемах не шарю, могу подпаять наушники, сделать простенький усилитель для микр. Бюджет до 10000руб До этого было 3 руля dfgt tmx t300.
Вообщем решил начать делать руль ДД. Почему ДД? - Посмотрев и подумав, понял что собирать с ремнями + делать дополнительный корпус ещё сложнее, при этом денег на механизм уйдёт столько же. Комплектующие которые хочу использовать. 1. Контроллер Arduino Leonardo (650р) https://aliexpress.ru/item/32834388225.html 2. Драйвер BTS7960 43A (350р) https://aliexpress.ru/item/1999464638.html 3. Энкодер пока не знаю какой, кто может подскажите пожалуйста. Думал этот брать https://aliexpress.ru/item/32877702646.html (500р), но вроде лучше брать OMRON E6B2CWZ6C https://aliexpress.ru/item/4001109112858.html (1500р) но при этом говорят что это подделка, если смысл переплачивать? И как узнать есть индекс или нету, как с индексом выбрать? 4. Двигатель буду брать Dynamo Sliver Pik 12-3/10-3 (3500р+доставка500р), 10-1 нету или оверпрайс. Или есть ещё какие нибудь аналоги? фф сильный не нужен, уровня t300 хватит. 5. БП для пробы есть обычный от пк 300w на 12в (300р). Когда всё проверю куплю более мощный. 6. Крепление руля пока что не знаю, буду искать и можете предложить. 7. Руль для начала какой нибудь гоночный-LADA итп.. (500р) 8. ПО и инструкции буду брать от сюда https://www.kaskus.co.id/show_post/5879c1b9ded770e7728b456c/1326/- так понимаю тут схема и прошивка полностью рабочая и по ней делают. Уровень моих рук - не из попы, но чуть чуть ниже плеч, в программирование и в проф электр схемах не шарю, могу подпаять наушники, сделать простенький усилитель для микр. Бюджет до 10000руб До этого было 3 руля dfgt tmx t300.


(1).jpg.d447b288dcef1978948f1316f75ec925.jpg)