MadInt
-
Постов
28 -
Зарегистрирован
-
Посещение
-
Победитель дней
1
Достижения MadInt
")



-
Я делал такую сборку (два китайских BTS в параллель) на старом проекте на моторе стеклоочистителя. При этом еще радиатор поменял на кулер от процессора. Все нормально работало на токах >10А и блоке 27В.

-
VESC с родной прошивкой. Мало информации. Настройки на стороне VESC имеют значение, при калибровке в VescTool необходимо добиться чтобы двигатель вращался на минимальных оборотах. Если он издает звуки но не крутится то меняем параметры (в подсказках написано что делать). Управление двигателя должно быть током, Duty Cycle не подходит.
-
Наборот, АКБ должен быть больше БП на 1-1,5 вольта.
-
У аккумов напряжение полного заряда 14В. БП на 27В (минус где-то 0.5В на диодах), поэтому они всегда немного разряжены, рекуперация не может полностью их зарядить. Допустим мы входим в поворот - контроллер хочет больших токов и ему их дает БП + аккум. Затем мы выходит из поворота, руль возвращаем обратно. На прямой усилие минимально - БП заряжает аккум. Если мы резко дергаем руль то рекуперация немного его тормозит и идет заряд аккумов.
-
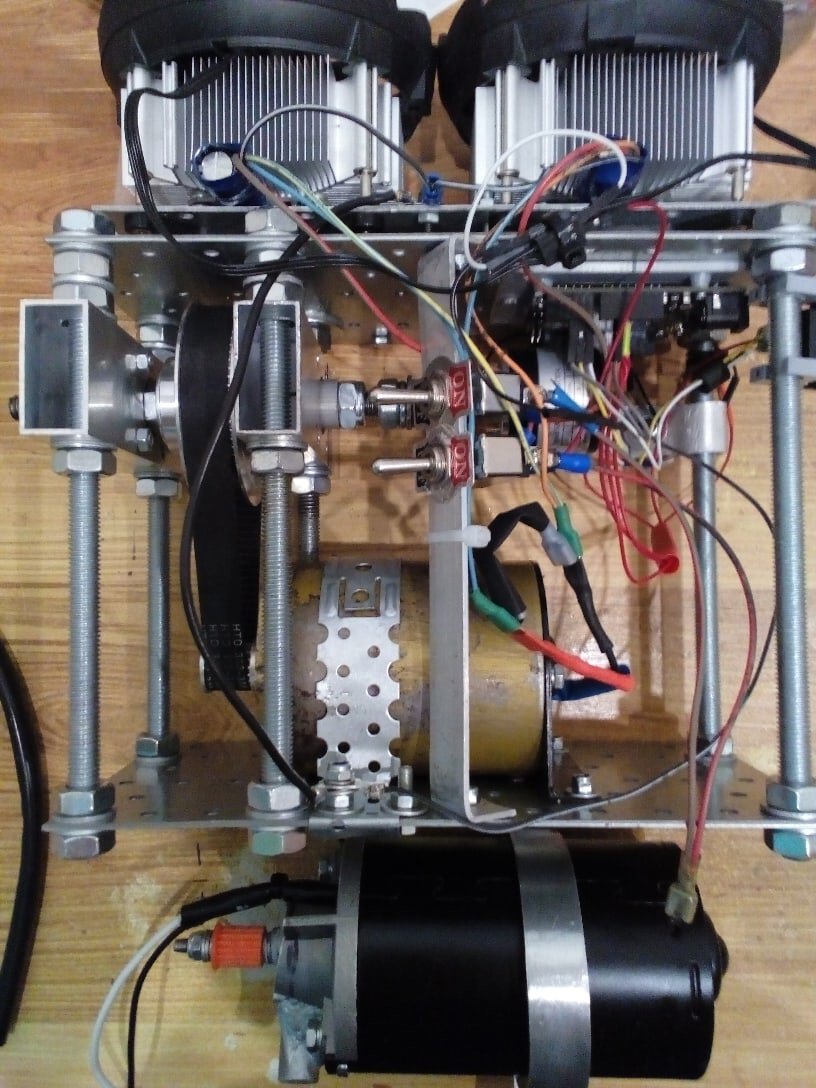
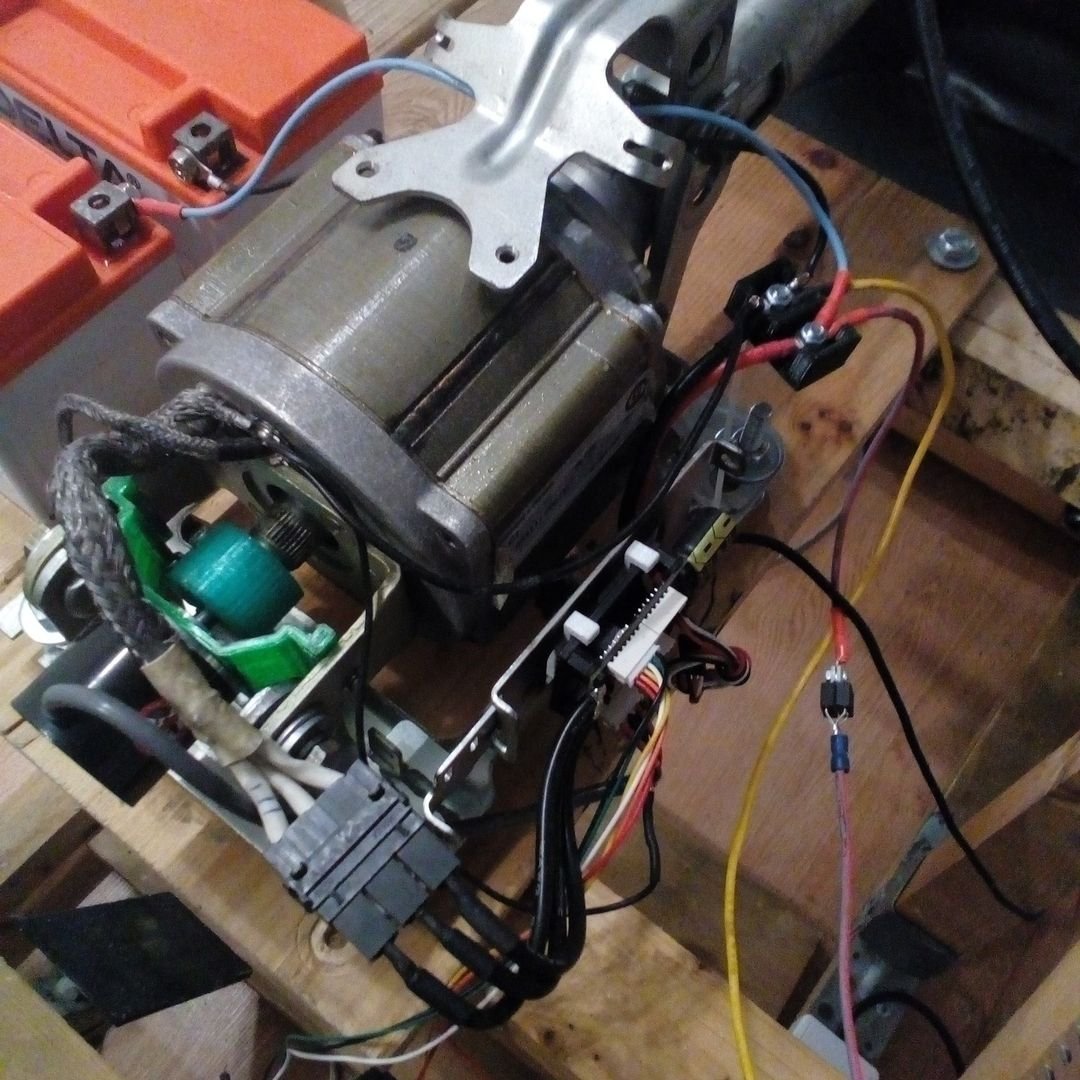
У меня БП аж на 27 вольт, мотор даже нет намека на нагрев. Контроля зарядки у меня нет, просто после БП стоит спарка диодов и после них и перед контроллером в параллель два аккумулятора мотоциклетных соедиенных между собой последовательно. Идея в том что при рекуперации мотором заряд идет на аккумы, а при пиковых токов они помогают БП. Контроллер использую VESC. Odrive с прошивкой автора скорее всего будет работать, принципальных отличий этот ЭУР и мотор-колесо не имеют. ЭУР быстрее примерно раза в два за счет меньшего количества полюсов и меньшего диаметра. Вообще говоря в том же CSL DD или Moza используется совершенно такой же электродвигатель, так что для ДД он прекрасно подходит. Впрочем мотор колесо все равно легче, компактнее и дешевле.
-
Не видел родной блок управления но могу предположить что там завязка сделана на датчик момента. Чем больше усилие, тем больше даем ток на двигатель. Поэтому в родной системе нет датчика угла поворота/энкодера а только датчики холла. В принципе если выкинуть обвязку датчика момента и подавать туда что-то типа аналогового сигнала то можно будет управлять током двигателя (и соответственно моментом на колонке). Но точность будет так себе.
-
VESC с обычной прошивкой. Нет у меня STM Да планирую для VESC написать прошивку FFB в отдаленном будущем.
-
Брал здесь, но тогда он стоил в два раза меньше
-
EMC ведь нужен адруино или СТМ? У меня в схеме их нет.
-
VESC управляется через UART напрямую с ПК. Схема: Игра с FFB -> vJoy -> фидер-конвертор FFB в команды UART интерфейса VESC -> VESC + двигатель
-
VESC используется в режиме FOC с энкодером. Настройка через утилиту от разработчика, практически все по дефолту. Только время лямбды увеличено раза в два перед автонастройкой FOC и мультипликатор наблюдателя раза в три-четыре после автонастройки (увеличивал пока мотор не начал крутиться при минимальных значениях тока).
-
У меня руль на VESC, отдача FFB управляет током. Так вот при нулевом токе руль крутится свободно.
-
Вместо резистора можно было лампочку H3 поставить, тогда и светодиод был бы не нужен. Я у себя вместо всей этой схемы поставил два аккумулятора после диода. Хоть какая-то польза.
-
Либо в схеме ошибка, либо я чего-то не понимаю. По сути входы компаратора закорочены.
-
Что именно и как? Трехфазный автомобильный генератор это синхронный электродвигатель наоборот. Разница только в том что магнитное поле в роторе возбуждается током. Чтобы превратить его в BLDC нужно поставить ротор с постоянными магнитами. Магнитов должно быть меньше чем обмоток в статоре.