Поиск
Показаны результаты для тегов 'ebolzmagy'.
Найдено 2 результата
-
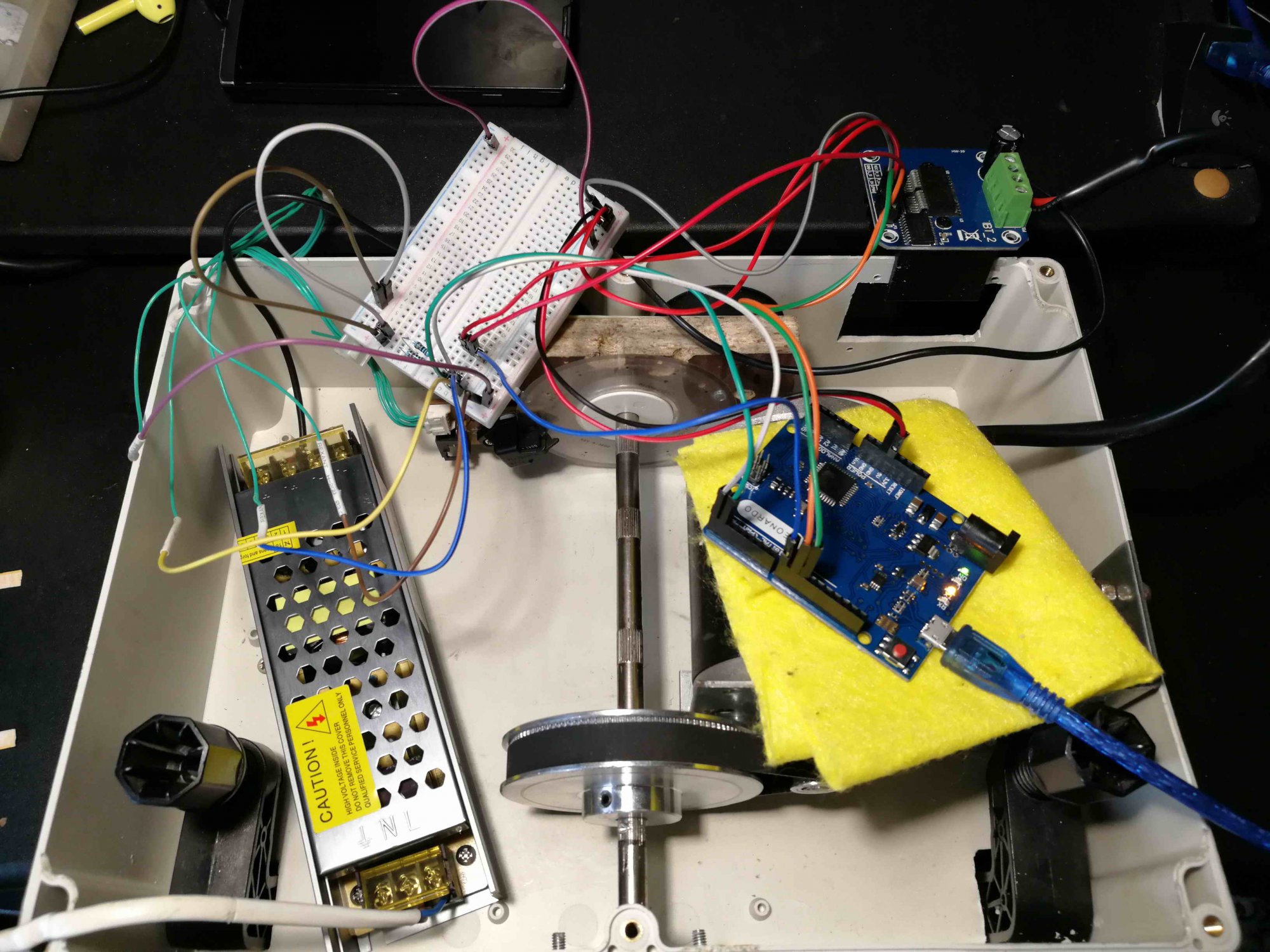
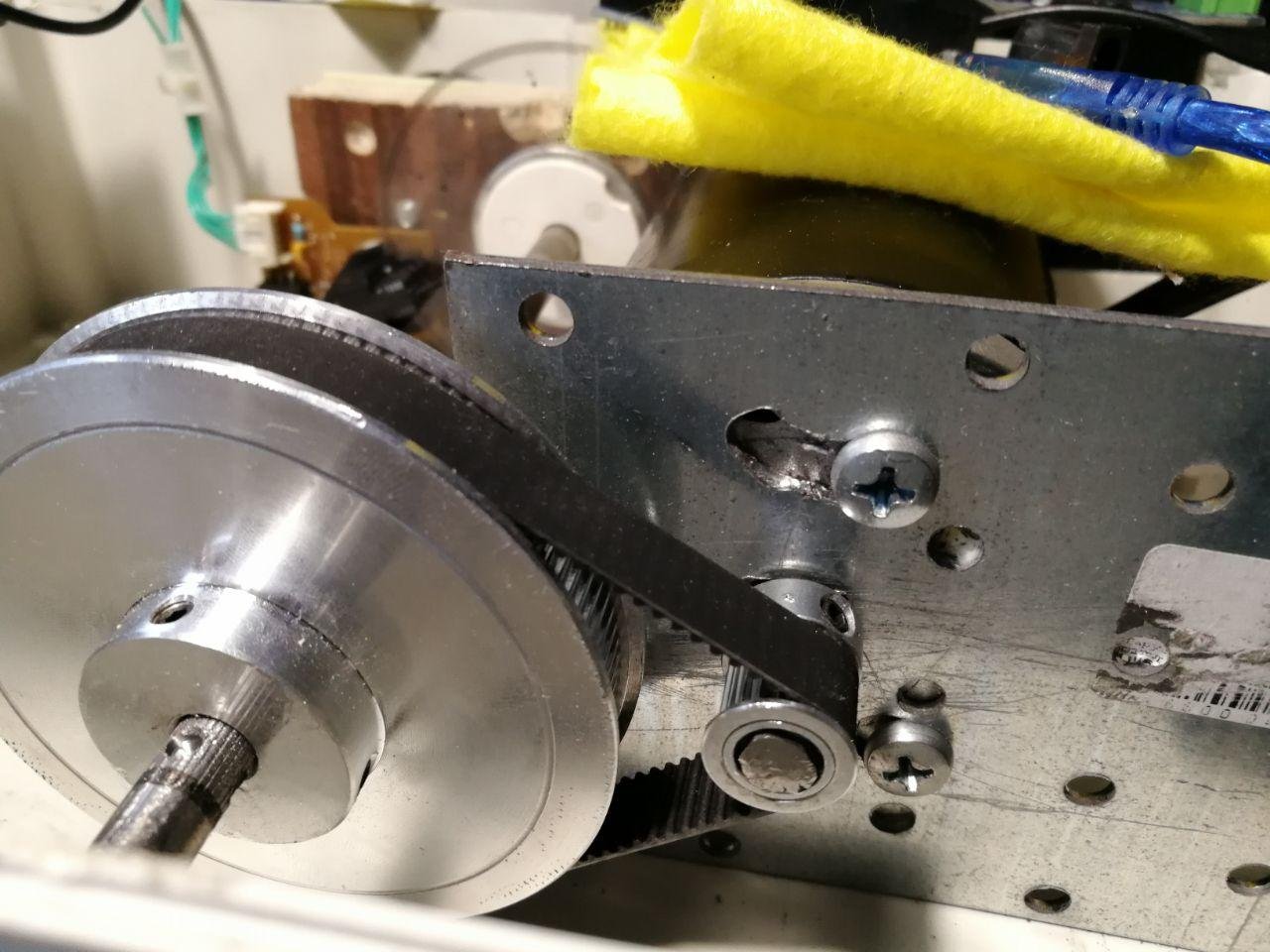
 За основу взято прочитанное и увиденное на различных зарубежных форумах. В основном руководствовался видео от Caravangoes и AgaYuditra на youtube. Для сборки было приобретено: Пластиковый короб 290х210х100. Асинхронный коллекторный двигатель 24 вольта\100 ватт. Два алюминиевых шк...
За основу взято прочитанное и увиденное на различных зарубежных форумах. В основном руководствовался видео от Caravangoes и AgaYuditra на youtube. Для сборки было приобретено: Пластиковый короб 290х210х100. Асинхронный коллекторный двигатель 24 вольта\100 ватт. Два алюминиевых шк...
-
 Всем доброго времени суток, хорошего и доброго настроения. Близится зима (ноябрь.2019) чувствую что пора вкатится снова в симрейсинг, но оборудование уже никакого не осталось, а покупать что-то готовое не хочется, поэтому Начинаю постройку своего Первого руля. до этого я строил 2DOF...
Всем доброго времени суток, хорошего и доброго настроения. Близится зима (ноябрь.2019) чувствую что пора вкатится снова в симрейсинг, но оборудование уже никакого не осталось, а покупать что-то готовое не хочется, поэтому Начинаю постройку своего Первого руля. до этого я строил 2DOF...