Поиск
Показаны результаты для тегов 'FFB'.
Найдено 5 результатов
-

DIY FFB steering wheel
Caravangoes опубликовал тема в Всё для симрейсинга - Рули, сиденья, железо для ПК
Приветствую, уважаемые коллеги по интересам! Заметил, что на форуме начали появляться и обсуждаться проекты самодельных FFB рулей. Тема для меня очень интересная по нескольким причинам: 1) Мой G27 по мере глубокого погружения в симуляторы перестал меня устраивать по некоторым параметрам, а...- 3127 ответов
-
- 24
-

-

-
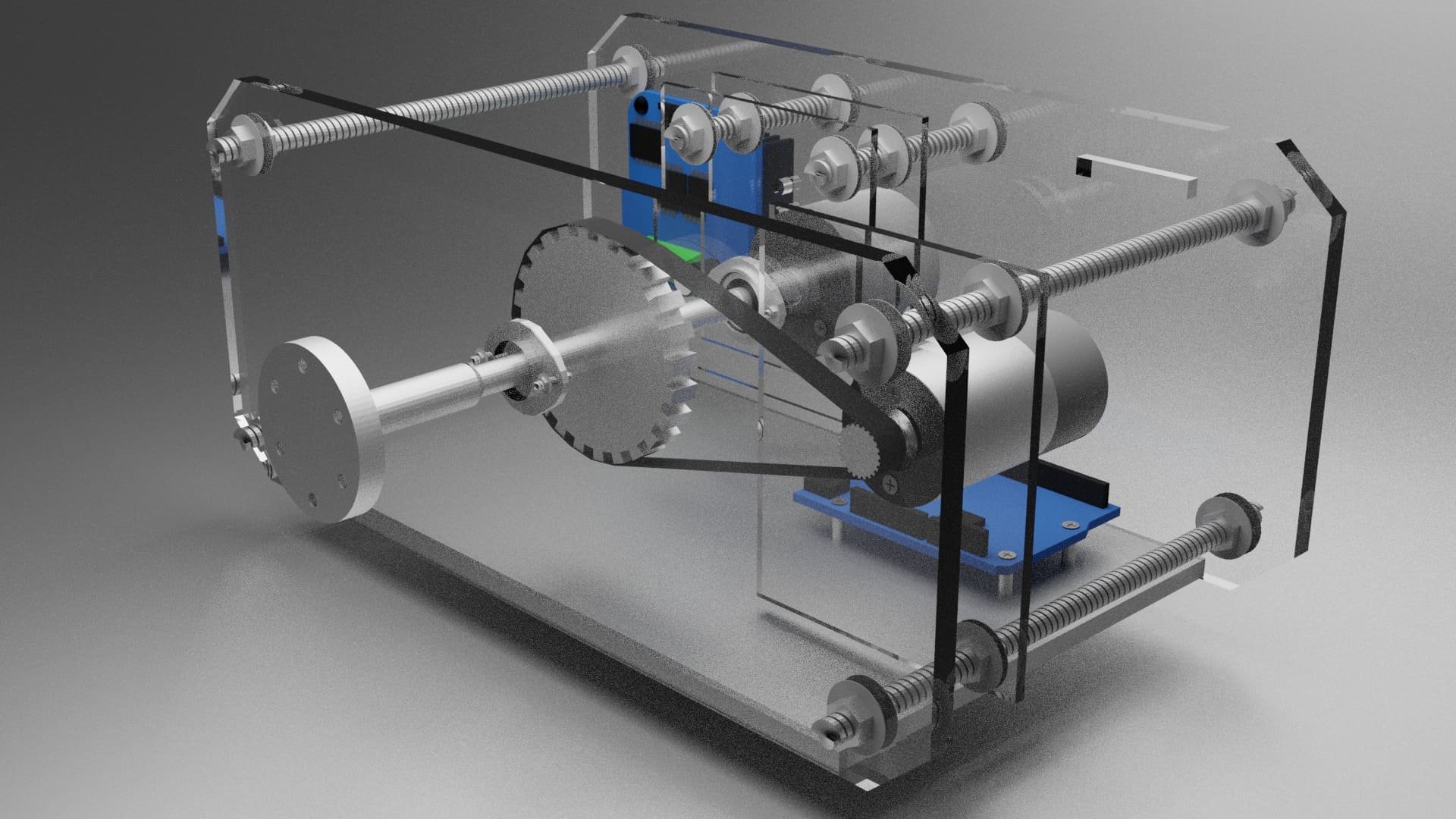
 Всем привет, больше года назад посетила меня мысль сконструировать свой руль с обратной отдачей, так как денег на хороший руль не было, а руки горели. По итогу конечно все это вышло в немаленькую сумму, за которую можно было купить подержанную базу именитых брендов, но сам интерес к самоделке только...
Всем привет, больше года назад посетила меня мысль сконструировать свой руль с обратной отдачей, так как денег на хороший руль не было, а руки горели. По итогу конечно все это вышло в немаленькую сумму, за которую можно было купить подержанную базу именитых брендов, но сам интерес к самоделке только...
-
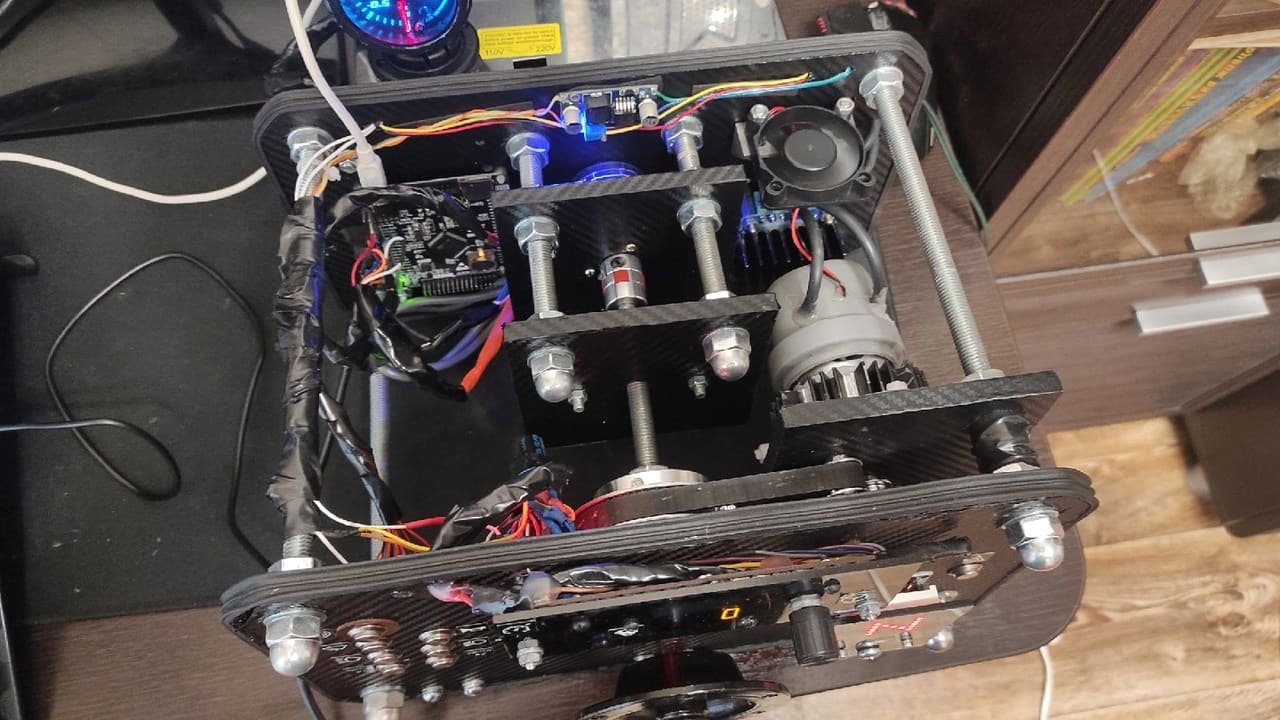
 Всем доброго времени суток дорогие друзья. Это мой первый пост на форумах, так что не судите строго если есть какие то ошибки сразу извиняюсь, мог не заметить. Давайте начнем. Кому интересна моя предыстория то она будет под спойлером: (кому не охота все читать у меня на канале есть видео где я...
Всем доброго времени суток дорогие друзья. Это мой первый пост на форумах, так что не судите строго если есть какие то ошибки сразу извиняюсь, мог не заметить. Давайте начнем. Кому интересна моя предыстория то она будет под спойлером: (кому не охота все читать у меня на канале есть видео где я...
-
Смотреть с 2:45 https://www.youtube.com/watch?v=i4dDEmg64BE
-
Привет, долго лазил по форуму, пытаясь найти свою проблему, но ничего похожего не обнаружил. Поэтому прошу у вас совета или помощи. Не так давно стал "счастливым" обладателем G27. Руль приобрел б/у, вроде не убитый (по внешнему виду в хорошем состоянии), калибруется нормально. Но обнаружил некот...